Schneckengetriebe









Ein Schneckengetriebe (englisch worm drive) ist eine Kombination aus Schraubgetriebe und Zahnradgetriebe und besteht aus einer schraubenförmigen Schneckenwelle und einem Zahnrad, dem Schneckenrad. Der Gewindegang der Schneckenwelle greift in die Zahnlücken des Schneckenrads ein.
Im Gegensatz zum Zahnradgetriebe mit teilweise nur wälzendem Kontakt findet hier auch eine permanente gleitende Berührung wie in einem Schraubgetriebe statt. Dies ist der Hauptgrund für den für hohe Übersetzungen relativ niedrigen Wirkungsgrad und die meist notwendige Kühlung eines solchen Getriebes. Es ist aber auch der Grund dafür, dass das Schneckengetriebe der geräuschärmste und ein Verzahnungsantrieb mit relativ hoher Belastbarkeit ist.
Ein Schneckengetriebe ist im Umkehrbetrieb i. d. R. (außer bei sehr steilem Verzahnungswinkel) selbsthemmend (keine Drehübertragung vom Schneckenrad zur Schneckenwelle), was oft genutzt wird, wenn das angetriebene Element keine Eigenbewegungen auf den Antrieb übertragen soll.
Geschichte
[Bearbeiten | Quelltext bearbeiten]Wann genau das erste Schneckengetriebe entstand, ist nicht überliefert. Von Albrecht Dürer (* 1471 † 1528), der sich auch mathematisch Schnecken und Spiralen widmete, ist eine Zeichnung mit Darstellung eines Schneckengetriebes bekannt. Im 19. Jahrhundert verbreiteten sich Anwendungen für Schiffsruderanlagen. In der Frühzeit der Motorisierung wurden in der Fahrzeugtechnik Kettengetriebe genutzt, die Anfang des 20. Jahrhunderts durch Differentialgetriebe mit Schneckengetrieben abgelöst wurden.[1] Im 21. Jahrhundert sind Schneckengetriebe weiterhin verbreitet anzutreffen. Eine bekannte Anwendung ist die Stimmmechanik bei Saiteninstrumenten.
Konstruktion
[Bearbeiten | Quelltext bearbeiten]Ein Schneckengetriebe besteht aus einer mit einem oder mehreren Schraubengängen versehenen Welle, der Schnecke, und einem darin kämmenden schrägverzahnten Rad, dem Schneckenrad. Die Achsen der beiden sind zumeist um 90° versetzt. Spezielle Einsatzgebiete für ein solches Getriebe sind dort, wo in einem Schritt hohe Untersetzungen (bis 150) und/oder Selbsthemmung gefragt sind. Es gibt links- und rechtssteigende Schnecken. Beide Drehrichtungen sind gleichermaßen möglich. Der Antrieb der meisten Anwendungen erfolgt über die Schnecke.
Das Übersetzungsverhältnis berechnet sich als Quotient der Zähnezahl z2 des Schneckenrades durch die Gangzahl z1 der Schnecke. Bei Antrieb von der Schnecke erfolgt eine Drehzahlwandlung ins Langsame, bei Antrieb vom Rad hingegen erfolgt eine Erhöhung der Drehzahl (nur möglich bei nichtselbsthemmenden Paarungen).
Selbsthemmung tritt durch die Gleitreibung zwischen Schnecke und Schneckenrad auf, jedoch nur bei hoher Übersetzung, geringen Gangzahlen und einem Steigungswinkel der Schnecke ɣ < 5°. Sie bewirkt, dass mittels selbsthemmender Schneckengetriebe die Drehzahl nur stark reduziert, jedoch nicht stark erhöht werden kann. Dieser Effekt kann mit genutzt werden, um benötigte Bremsen an Getrieben für Aufzüge oder Kettenzüge kleiner dimensionieren zu können. Aus Sicherheitsaspekten kann die Selbsthemmung keine Bremse ersetzen.
Die Schnecke
[Bearbeiten | Quelltext bearbeiten]Generell ist die Schnecke eine Sonderform eines schrägverzahnten Zahnrades. Der Winkel der Schrägverzahnung ist so groß, dass ein Zahn sich mehrfach schraubenförmig um die Radachse windet. Der Zahn wird in diesem Fall als Gang bezeichnet. Es gibt eingängige oder mehrgängige Schnecken. Übliche Werkstoffe für Schnecken sind Einsatz- oder Nitrierstähle. Die Oberfläche erhält durch Einsatzhärten oder Nitrieren eine verschleißfeste Schicht.
Das Schneckenrad
[Bearbeiten | Quelltext bearbeiten]Schneckenräder bestehen überwiegend aus Sn-Bronzen (CuSn) und werden ab einer bestimmten Größe aus Kostengründen als Radkränze gefertigt, welche auf günstigere Grundkörper (z. B. aus Stahlguss) montiert werden. Die Herstellung erfolgt im Strangguss GC für kleine und untergeordnete Verzahnungen oder als Schleuderguss GZ bei höheren Festigkeitsansprüchen im Verzahnungsbereich. Bronze eignet sich aufgrund der guten Notlaufeigenschaften in Verbindung mit Stahl für den Getriebebau. Bei hohen zu übertragenden Momenten wird auf Sondermessing oder Aluminiumbronze zurückgegriffen. Hier ist darauf zu achten, dass die Gleitgeschwindigkeit gegenüber den Sn-Bronzerädern stark vermindert werden muss.
Arten
[Bearbeiten | Quelltext bearbeiten]- Zylinder-Schneckengetriebe
Der Grundkörper der Schnecke hat zylindrische Form und das Schneckenrad eine dem Durchmesser der Schnecke entsprechende (globoidische) Wölbung. Vorteil ist hier die einfachere Herstellung der Schnecke, weshalb diese Art auch die verbreitetste ist und auch als „Standardform“ bezeichnet wird.
- Globoid-Schneckengetriebe
Hier besitzt die Schnecke eine globoidische Form, und das Schneckenrad wird zylindrisch ausgeführt. Große Vorteile bringt die Möglichkeit der Verwendung eines herkömmlichen schrägverzahnten Zahnrads als Schneckenrad, allerdings wird die Fertigung der Schnecke wesentlich aufwendiger.
Schneckengetriebe mit Globoidschnecke (Schnecke mit bogenförmigen Gewinde)

- Globoidgetriebe
Dieses stellt eine Sonderbauform dar, bei der sowohl Schnecke als auch Schneckenrad als globoidische Körper ausgeführt werden. Aufgrund des hohen Fertigungsaufwandes der Schneckenverzahnung werden diese allerdings nur als Einzelstücke und in Sonderfällen eingesetzt und in der Regel nicht in Serie hergestellt.
- OTT Schraubgetriebe: Spieleinstellbares Schneckengetriebe
Die Schnecke besteht bei dieser Ausführung aus 2 Teilen: einer Schaftschnecke und einer Hohlschnecke. Durch Verdrehen der beiden Schneckenteile wird das Spiel zwischen Schnecke und Schneckenrad eingestellt. Die Zähne sind so ausgebildet, dass jeweils nur eine Seite des Schneckenzahnes am Radzahn trägt.
- Duplex-Schneckengetriebe: Spieleinstellbares Schneckengetriebe
Schneckenwelle mit zwei unterschiedlichen Steigungen/Moduln auf Vor- und Rückflanke. Durch axiales Nachstellen der Schneckenwelle relativ zum Schneckenrad werden stärkere Schneckenwindungen in spielarmen Eingriff gebracht. Proportional zur Übersetzung tragen auch hier mehrere Zähne gleichzeitig.
Materialien und Schmierung
[Bearbeiten | Quelltext bearbeiten]Die Herstellung von Schneckengetrieben stellt erhöhte Anforderungen an den Produktionsprozess in Bezug auf Herstellgenauigkeit und Oberflächenbeschaffenheit, um die Reibung zu verringern. Aus dem gleichen Grund sind Schnecke und Schneckenrad aus unterschiedlichen Materialien gefertigt; während die größerem Verschleiß ausgesetzte Schnecke z. B. aus gehärtetem Stahl besteht, ist das Schneckenrad oft weicher und besteht aus Messing, Bronze oder einem selbstschmierenden Kunststoff.
Freiliegende Schneckengetriebe werden mit Fett geschmiert, bei geschlossenen Gehäusen kann auch Öl zur Schmierung eingesetzt werden. So werden z. B. synthetische Öle auf Polyglycol-Basis zur Schmierung eingesetzt. Bei Sondermessing oder Aluminiumbronze kommen PG-Öle nicht in Frage, sondern hier kann nur mit Mineralölen geschmiert werden. Der Ölvorrat ist nach der Gehäuseauslegung und der vorgesehenen Wärmeabfuhr (Tauchschmierung / Umlaufschmierung) zu richten.
Da sich Schneckengetriebe im Dauerbetrieb durch den niedrigen Wirkungsgrad bei hohen Übersetzungen erhitzen können, ist es wie in anderen Getrieben eine weitere Aufgabe des Schmierstoffes, die Wärme abzutransportieren. Kann er diese leicht an das zu diesem Zweck gerippte Gehäuse abgeben oder wird dieses gar durch einen Ventilator angeblasen, kann der Ölvorrat geringer sein.
Anforderungen an die Konstruktion
[Bearbeiten | Quelltext bearbeiten]Da die Schnecke schraubenförmig verzahnt, aber fest gelagert ist, treten hohe axiale Kräfte auf. Je nach Betrieb, ob nur in eine Drehrichtung oder in beide, sind die entsprechenden Seiten z. B. mit Axiallagern ausreichend abzustützen. Für das Schneckenrad gelten analog die Bedingungen für schrägverzahnte Stirnzahnräder.
Weiterhin ist zu beachten, dass die Schnecke auch auf Biegung beansprucht wird und die Lagerung dementsprechend elastisch oder winkelausgleichend ausgeführt werden muss. Ein korrekter Zahneingriff bei durch Biegung entstehender Achsabstandsänderung ist nur bei Einsatz von Schnecken mit Evolventenflanken gewährleistet. Bei Hohlflankenschnecken kann sich durch die Durchbiegung ein schädliches Kantentragen einstellen.
Anwendungen
[Bearbeiten | Quelltext bearbeiten]Einsatz finden Schneckengetriebe als Leistungsgetriebe in Pressen, in Walzwerken, in der Fördertechnik, in Bergbaumaschinen und Rudermaschinen, aber auch in Präzisionsausführung als Duplex-Schnecke in Fräsköpfen und Rundtischen.
Weitere Anwendungen sind Stellantriebe, z. B. in mehrgängigen Trimmwiderständen, sowie vor allem in der Vergangenheit Lenkgetriebe und Differentialgetriebe für Kfz sowie im Nockenwellenantrieb mit Königswelle beim Motorrad Jawa 500 OHC, Typ 15/01 und der Hinterradantrieb einiger Motorräder (Richard Gruhn, 1928).
Beispiel für die Übersetzung ins Schnelle sind mechanische Antriebe von Zentrifugen in Molkereimaschinen, Drehwähler und aerodynamische Bremsen bzw. Fliehkraftregler in Grammophonen und Spieldosen.
-
 Spieldosenmechanik mit Schneckenantrieb
Spieldosenmechanik mit Schneckenantrieb -
 Stimmmechanik mit Schneckenantrieb
Stimmmechanik mit Schneckenantrieb -
 Trimmpotentiometer mit Schneckenantrieb
Trimmpotentiometer mit Schneckenantrieb -
 Kraftfahrzeug, Lenkung mit Schneckenantrieb
Kraftfahrzeug, Lenkung mit Schneckenantrieb -
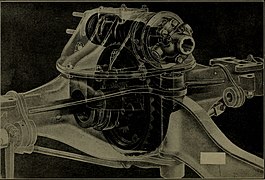 Kraftfahrzeug, Differentialgetriebe mit Schneckenantrieb
Kraftfahrzeug, Differentialgetriebe mit Schneckenantrieb




_(14801800313).jpg)
Literatur
[Bearbeiten | Quelltext bearbeiten]- Hugh Kerr Thomas: Worm gearing. McGraw-Hill Book Company, New York 1913, OCLC 250660390 (englisch).
- Frederick A Halsey: Worm and spiral gearing. Van Norstrand, London 1918, OCLC 44489586 (englisch).
Weblinks
[Bearbeiten | Quelltext bearbeiten]https://archive.org/details/wormgearing00thomrich/page/n7/mode/1up
Einzelnachweise
[Bearbeiten | Quelltext bearbeiten]- ↑ Hugh Kerr Thomas: Worm gearing. (archive.org).