Mars 2020
| Mars 2020 | ||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Phase: E / Status: aktiv | ||||||||||||||||||||||
 Selfie des Rover Perseverance mit Helikopterdrohne Ingenuity (nahe der Van Zyl-Erhebung am 7. April 2021)
| ||||||||||||||||||||||
| Typ | Raumsonde (Rover) | |||||||||||||||||||||
| Land | ||||||||||||||||||||||
| Organisation | Jet Propulsion Laboratory | |||||||||||||||||||||
| COSPAR-Bezeichnung | 2020-052A | |||||||||||||||||||||
| Missionsdaten | ||||||||||||||||||||||
| Startdatum | 30. Juli 2020, 11:50 UTC[1][2] | |||||||||||||||||||||
| Startplatz | Cape Canaveral AFS, SLC-41 | |||||||||||||||||||||
| Trägerrakete | Atlas V (541) (AV-088) | |||||||||||||||||||||
| Landeplatz | Jezero-Krater | |||||||||||||||||||||
| Allgemeine Raumfahrzeugdaten | ||||||||||||||||||||||
| Startmasse | 3839 kg | |||||||||||||||||||||
| Leermasse | 899 kg (Masse des Rovers) | |||||||||||||||||||||
| Nutzlastdaten | ||||||||||||||||||||||
| Instrumente |
PIXL, RIMFAX, MEDA, MOXIE, SuperCam, Mastcam-Z, SHERLOC | |||||||||||||||||||||
| Sonstiges | ||||||||||||||||||||||
| Vorherige Mission |
Mars Science Laboratory | |||||||||||||||||||||
| ||||||||||||||||||||||
Mars 2020 ist die fünfte Mars-Rover- und erste Helikopter-Mission der NASA auf dem Mars. Mittels einer Atlas-V-Trägerrakete wurde am 30. Juli 2020 vom Cape Canaveral eine Landesonde mit dem Rover Perseverance (deutsch „Ausdauer“, „Beharrlichkeit“) mit seinem Kleinhelikopter Ingenuity („Einfallsreichtum“) auf den 480 Millionen Kilometer langen Flug zum Mars gestartet. Die Sonde landete am 18. Februar 2021 auf der nördlichen Marshalbkugel im Jezero-Krater,[3] womit sie seit 1366 Sol aktiv ist.
Missionsziele, -planung und -ablauf bis zum Start
[Bearbeiten | Quelltext bearbeiten]Die Mission ist Teil des Mars Exploration Program der NASA. Perseverance soll Marsgestein im Hinblick auf Biosignaturen, geologische Prozesse und die geologische Geschichte des Planeten genauer untersuchen, um so unter anderem Erkenntnisse über etwaiges Leben auf dem Mars zu gewinnen.[4][5] Außerdem soll der 2,5 Milliarden US-Dollar teure Rover das Klima auf dem Planeten untersuchen.[2] Die Mission dient auch der Vorbereitung eines bemannten Marsflugs. So wird der Rover testweise Kohlenstoffdioxid in Sauerstoff umwandeln und diese Ergebnisse analysieren.[6] Mars 2020 wurde am 4. Dezember 2012 während des Herbsttreffens der American Geophysical Union in San Francisco angekündigt. In einem offenen Wettbewerb wurden wissenschaftliche Instrumente für den Rover ausgesucht, nachdem die Missionsziele bekannt gegeben worden waren. Nachdem über 60 Vorschläge eingegangen waren, kündigte die NASA im Juli 2014 die Landung des Rovers an, der ähnlich wie der Curiosity-Rover konstruiert werden sollte.
Als Landeplatz wurde ein 3,5 Milliarden Jahre altes ehemaliges Flussdelta im Jezero-Krater gewählt,[7][8] das in der Syrtis Major Planitia (18° 51′ 18″ N, 77° 31′ 8,4″ O) liegt und vor etwa 3,9 bis 3,5 Milliarden Jahren ein 250 Meter tiefer See war.[5] Als Alternativen waren alte hydrothermale Quellen im Nordosten der Hochebene Syrtis Major und bei den Columbia Hills in Betracht gezogen worden.[9]
Damit die Perseverance so keimfrei wie möglich zum Mars gelangt – andernfalls könnte der Rover auf dem Mars Spuren von Leben nachweisen, das er selbst dorthin gebracht hat –, wurde die Montage der Perseverance in einem Reinraum im Inneren eines weiteren Reinraums am Jet Propulsion Laboratory vorgenommen.[10]
Als Trägerrakete für den Start der Raumsonde wurde die Atlas V 541 gewählt. Die Rakete ist 58 Meter hoch und besteht neben der Erststufe aus vier Feststoff-Boostern und einer Centaur-Oberstufe.[11] Das Startfenster für die Mission wurde nach einer Verschiebung auf den Zeitraum vom 30. Juli bis zum 15. August 2020 festgelegt; Startplatz war die Startrampe 41 der Cape Canaveral Air Force Station in Florida.[12]
- Planungsverlauf – Mars 2020
-
 Raumkapsel Mars 2020 a
Raumkapsel Mars 2020 a -
 Landungsgebiet: Flussdelta im Jezerokrater
Landungsgebiet: Flussdelta im Jezerokrater -

.jpg)




③ Abstiegsstufe ④ Rover (Perseverance) ⑤ Hitzeschild
Aufbau und Technik der Raumsonde gegenüber der Marsmission MSL
[Bearbeiten | Quelltext bearbeiten]Der Aufbau der Raumsonde und die Technik der Marschflug- und Landesysteme der Mars 2020 unterscheiden sich vor allem hinsichtlich der unterschiedlichen Rover und der weiterentwickelten Abstiegsstufe bedeutend von der der Marsmission Mars Science Laboratory (MSL).
Die Leit- und Steuerungstechnik der Mars 2020 konnte gegenüber der Marsmission MSL dahingehend verbessert werden, dass zum einen die Landestufe der Mars 2020 um die Funktion ergänzt wurde, Hindernissen auszuweichen[13][14] und zum anderen die Abweichung der Eigenlokalisierung der Abstiegsstufe von 3000 Meter auf 40 Meter reduziert wurde.[15]
Missionsfortschritt
[Bearbeiten | Quelltext bearbeiten]Flug zum Mars
[Bearbeiten | Quelltext bearbeiten]Am Tag der Landung auf dem Mars hatte die Sonde bezogen auf die Sonne einen Weg von 470 Millionen Kilometern zurückgelegt.[16] Die Distanz zwischen Erde und Mars schwankt zwischen 56 Millionen Kilometern und 401 Millionen Kilometern.[17] Die Sonde legte eine größere Distanz zurück als die maximale Entfernung zwischen Erde und dem langsamer umlaufenden Mars – das Startfenster ist ein Kompromiss zwischen Flugzeit und Antriebsenergie. Etwa 20 Stunden vor der Landung lag die Reisegeschwindigkeit (relativ zur Sonne) der Sonde bei etwa 76.820 Kilometer pro Stunde.[16]
Landung auf dem Mars
[Bearbeiten | Quelltext bearbeiten]
Der Anflug und die Landung am 18. Februar 2021 erfolgten aufgrund der Signallaufzeit von etwa 11 Minuten zwischen Erde und Mars wie bei vorhergehenden Missionen vollautomatisch; die Instruktionen hierzu wurden der Sonde und dem Rover einprogrammiert. Die Abstiegsstufe war in der Lage, Hindernisse zu erkennen und ggf. den Landeplatz mit Seitwärtsbewegungen um bis zu 300 Meter zu ändern.[13][14]
Während und nach der Landung, die um 20:55 Uhr (UTC) im Mission Control Center des JPL bestätigt wurde, überflog die Raumsonde Mars Reconnaissance Orbiter, die über das Deep Space Network mit der Erde verbunden ist, die Landestelle und diente als Relaisstation. Wenige Stunden nach der Landung überflog der Exomars Trace Gas Orbiter die Landestelle und übernahm die Rolle als Relaisstation.[18] Die Raumsonde Maven veränderte ihrerseits vor der Landung der Mars 2020 ihren Kurs, um den Vorgang mit ihren Instrumenten zu dokumentieren.[19] Die Mars Express überwacht im Zuge der Mission die lokalen Wetterbedingungen.[18]
Wichtige Missionsetappen
[Bearbeiten | Quelltext bearbeiten]- Am 22. Februar 2021 wurden erstmals Tonaufnahmen vom Mars veröffentlicht.[20]
- Am 19. April 2021 flog die Helikopterdrohne Ingenuity für 39 Sekunden erstmals auf dem Mars und erreichte dabei eine Flughöhe von 3 Metern.[21][22] Damit flog erstmals[23] ein Helikopter auf einem fremden Himmelskörper.[22]
- Am 20. April 2021 wurde erstmals in der Geschichte der Raumfahrt auf einem fremden Planeten Sauerstoff gewonnen. Das Instrument MOXIE stellte bei diesem ersten Test auf dem Mars innerhalb einer Stunde 5,4 Gramm Sauerstoff aus Kohlenstoffdioxid her.[24] Ein Astronaut könnte hiermit für zehn Minuten atmen.[25]
- Am 1. September 2021 gelang die erste Gesteinsprobenaufnahme der Perseverance nach zuvor erfolgter Gesteinsbohrung.[26]
Instrumente der Perseverance
[Bearbeiten | Quelltext bearbeiten](Dauer: 2:20 Min)
Neben 23 Kameras ist der Rover auch mit zwei Mikrofonen ausgestattet, mit denen erstmals Töne vom Mars übertragen werden konnten. Zwar hatten bereits zwei vorhergehende NASA-Missionen Schallwandler an Bord, jedoch scheiterte die Landung von Mars Polar Lander, und das in der Kamera des Abstiegsmoduls von Phoenix eingebaute Mikrofon wurde nie aktiviert.[27] Bei der Perseverance wurde dagegen das Mikrofon in Betrieb genommen. Die Perseverance nahm sowohl Windgeräusche des Planeten, als auch die der Helikopterdrohne auf – und ist damit die erste Maschine außerhalb der Erde, die Töne einer anderen Maschine außerhalb der Erde aufgenommen hat.[28][29]
Mastcam-Z
[Bearbeiten | Quelltext bearbeiten]Mastcam-Z ist ein panoramisches und stereoskopisches Kamerasystem mit Zoomobjektiv. Das Instrument soll außerdem die Minerale auf der Oberfläche des Mars bestimmen und bei der Navigation helfen. Das Instrument wurde von der Gruppe um James Bell an der Arizona State University in Tempe entwickelt.[30] Gebaut wurde es unter anderem vom Malin Space Science Systems in San Diego, Kalifornien. Neben anderen US-amerikanischen Universitäten war bzw. ist auch das Deutsche Zentrum für Luft- und Raumfahrt und die österreichische Joanneum Research GmbH an dem Projekt beteiligt.[31]
SuperCam
[Bearbeiten | Quelltext bearbeiten]SuperCam ist ein Zusammenbau von vier Spektrometern, die per laserinduzierter Plasmaspektroskopie Analysen von Gesteinen und Böden durchführen sollen. Mit der Supercam kann nach organischen Verbindungen in Steinen und Regolithen gesucht werden. Sie wurde entwickelt, um Biosignaturen von Mikroben auf dem Mars zu identifizieren.[32]
Hauptsächlich wurde das Instrument von einem Team des Los Alamos National Laboratory, in Los Alamos, New Mexico, entwickelt. Beigetragen haben aber auch die französische Raumfahrtagentur (L’Institut de Recherche en Astrophysique et Planétologie [CNES/IRAP]) sowie Forschungseinrichtungen der Universitäten von Hawaii und der spanischen Universität Valladolid.[33]
Planetary Instrument for X-ray Lithochemistry (PIXL)
[Bearbeiten | Quelltext bearbeiten]Das Planetary Instrument for X-ray Lithochemistry (PIXL) ist ein Röntgenstrahlen-Fluoreszenzspektroskop, das auch mit einer hochauflösenden Kamera ausgestattet ist und die elementare Zusammensetzung der Marsoberfläche bestimmen soll. PIXL wurde von dem Team um Abigail Allwood, NASA Jet Propulsion Laboratory (JPL) in Pasadena, Kalifornien, entwickelt.[34][35]
Scanning Habitable Environments with Raman & Luminescence for Organics and Chemicals (SHERLOC)
[Bearbeiten | Quelltext bearbeiten]Scanning Habitable Environments with Raman & Luminescence for Organics and Chemicals (SHERLOC) ist ein Spektrometer, das mit Ultraviolett-Lasern die genaue Mineralogie und organische Verbindungen bestimmen soll. SHERLOC ist das erste Ultraviolett-Raman-Spektrometer, das zum Mars flog. Es wurde von dem Team um Luther Beegle, NASA Jet Propulsion Laboratory (JPL) in Pasadena, Kalifornien, verwirklicht.[36][37]
The Mars Oxygen ISRU Experiment (MOXIE)
[Bearbeiten | Quelltext bearbeiten]The Mars Oxygen ISRU Experiment (MOXIE) ist ein Instrument zur Erforschung einer Technologie, die das in der Marsatmosphäre vorhandene Kohlenstoffdioxid elektrochemisch in Sauerstoff und Kohlenmonoxid umwandelt. Der gewonnene Sauerstoff soll nach einer Analyse seiner Reinheit wieder mit dem Kohlenmonoxid in die Marsatmosphäre abgegeben werden. MOXIE wurde von einem Team des Massachusetts Institute of Technology in Cambridge, Massachusetts, entworfen.[38]
Mars Environmental Dynamics Analyzer (MEDA)
[Bearbeiten | Quelltext bearbeiten]Der Mars Environmental Dynamics Analyzer (MEDA) besteht aus einer Reihe von Sensoren, die für die Aufzeichnung von optischen Eigenschaften von Staub und sechs atmosphärischen Parametern entwickelt wurden. Die Abkürzung MEDA steht gleichzeitig für ¡me da! (spanisch für „Gib mir!“), im Sinne von: „Gib mir Informationen über Wetter, Staub, Strahlung!“[39] Die Instrumente wurden von einem Team des spanischen Instituto Nacional de Técnica Aeroespacial entworfen.[40]
Auf dem Mars soll MEDA die Größe und Menge der Staubpartikel sowie Windrichtung, Windgeschwindigkeit, Luftdruck, relative Luftfeuchtigkeit, Lufttemperatur, Bodentemperatur, bestimmte Bandbreiten von ultravioletter Strahlung, sichtbare Strahlung und Infrarotstrahlung messen. Die zu MEDA gehörenden Sensoren befinden sich auf der Oberseite und Front des Rovers, ebenso auf der oberen Rückseite des Remote Sensing Mast und in seinem Innenraum. Sie haben ein Gesamtgewicht von 5,5 Kilogramm.[39][41]
Die Sensoren des MEDA
[Bearbeiten | Quelltext bearbeiten]
- RDS – radiation and dust sensor (Sensor für Strahlung und Staub): Abmessungen: 13,2 cm × 11,5 cm × 12,5 cm; auf der Oberseite des Rovers, bestehend aus acht nach oben ausgerichteten Fotodioden
- HS – humidity sensor (Sensor für relative Luftfeuchtigkeit): Abmessungen: 5,5 cm × 2,5 cm × 7,25 cm; auf dem Remote Sensing Mast innerhalb eines Schutzzylinders und von einem Staubfilter umgeben angebracht
- TIRS – thermal infrared sensor (Infrarotsensor): Abmessungen: 6,25 cm × 5,25 cm × 5,75 cm; am Remote Sensing Mast angebracht auf die vordere rechte Seite des Rovers ausgerichtet; bestehend aus drei aufwärtsgerichteten und zwei abwärtsgerichteten Thermosäulen
- ATS1–ATS5 – air temperature sensor 1–5 (Lufttemperatursensoren 1–5): Abmessungen: 5,75 cm × 2,75 cm × 6,75 cm; drei um den Remote Sensing Mast, zwei weitere am Hauptteil des Rovers angebracht
- WS1–WS2 – wind sensor 1–2 (Windsensoren 1–2): Abmessungen: Windsensor 1: 5 cm × 17 cm und Windsensor 2: 25 cm × 40 cm; am Remote Sensing Mast angebracht
- PS – pressure sensor (Drucksensor und Kontrolleinheit): Abmessungen: 14 cm × 14 cm × 13 cm; im Inneren des Rovers mit einer nach außen führenden Röhre montiert[39][41]
The Radar Imager for Mars’ Subsurface Exploration (RIMFAX)
[Bearbeiten | Quelltext bearbeiten]The Radar Imager for Mars’ Subsurface Exploration (RIMFAX) ist ein Bodenradar, das alle 10 cm Fahrtstrecke ein Vertikalprofil gewinnt und so während der Fahrt ein zweidimensionales Bild des Untergrundes je nach Beschaffenheit bis über 10 m Tiefe liefert. Es analysiert anhand der reflektierten und gestreuten Funkwellen die geologische Struktur und Dichte des Bodens, um im und unter dem Sediment u. a. Gesteine, Meteoriten oder Wassereis und Sole erkennen zu können – das Landegebiet ist ein Einschlagkrater, der nachfolgend von Wasser überformt und von Sediment bedeckt ist. Das Gerät arbeitet mit Funkwellen zwischen 120 und 1200 MHz, um je nach Bodenbeschaffenheit eine hohe Eindringtiefe bei niedrigen Frequenzen und eine hohe vertikale Auflösung bei hohen Frequenzen zu haben. Das Instrument wurde von Norwegens Verteidigungsforschungsinstitut (Forsvarets forskningsinstitutt) um Svein-Erik Hamran entwickelt. RIMFAX ist das erste direkt auf dem Mars arbeitende Bodenradar und kann detailliertere Daten liefern als dies bisher vom Marssatelliten aus möglich war. Der Name geht auf Hrímfaxi, ein Pferd der nordischen Mythologie, zurück.[42][43][44]
Helikopterdrohne
[Bearbeiten | Quelltext bearbeiten]Einsatz
[Bearbeiten | Quelltext bearbeiten]
.png)
Im Rahmen der Mars-2020-Mission wurde erstmals eine Helikopterdrohne auf einem anderen Himmelskörper eingesetzt, der Mars Helicopter,[45][46] auch Ingenuity (englisch für Einfallsreichtum, Erfindungsgabe) genannt.[47] Außer Kameras trug Ingenuity keine Gerätschaften.[48] Die Drohne sollte vor allem als Testmodell für zukünftige Flugobjekte auf dem Mars dienen,[49] Nach NASA-Angaben war er als Technologie-Demonstrator für fünf Flüge ausgelegt.[50]
Beim erfolgreichen Erstflug am 19. April 2021 erreichte Ingenuity die vorgesehene Flughöhe von 3 m und hielt diese für 39 s.[21][51] Nach dem Abschluss der geplanten fünf Testflüge wurde Ingenuity mehrere Jahre lang dazu genutzt, um die Fahrtroute des Rovers auszukundschaften.[52]
Die Navigation des Helikopters wurde auf hügeligem Gelände ungenau, da in den Bordcomputer eine für flaches Gelände ausgelegte Navigation fest einprogrammiert war. Die zu erwartenden Schwierigkeiten wurden anhand von Simulationen bei der Planung der Flugrouten mit berücksichtigt.[53]
Am 14. April 2023 absolvierte die Drohne ihren 50. Flug.[54] Am 25. Januar 2024 gab die NASA das Ende der Ingenuity-Mission bekannt, nachdem der Helikopter sechs Tage zuvor beim 72. Flug beim Landen einen Rotorschaden erlitten hatte.[52]
Technik
[Bearbeiten | Quelltext bearbeiten]Ingenuity wurde sowohl aus eigens entwickelten als auch aus Off-the-shelf-Komponenten gebaut und mit sechs aus Solarzellen geladenen Akkumulatoren betrieben. Seine Masse beträgt 1,8 Kilogramm, was auf der Erde eine Gewichtskraft von 18 Newton ergibt. Auf dem Mars beträgt die Gewichtskraft nur 6,8 Newton.[55] Dass auf der Marsoberfläche nur etwa ein Drittel der Schwerkraft der Erde auf den Helikopter wirkt, erleichterte den Aufstieg. Die im Vergleich zur Erdatmosphäre etwa nur ein Hundertstel so dichte Gasatmosphäre des Mars erschwert dagegen das Erzeugen von Auftrieb durch die Rotoren des Helikopters. Um abheben zu können, verfügte der Helikopter über zwei koaxial montierte Rotoren. Diese bestanden aus je zwei CFK-Rotorblättern von 1,2 m Durchmesser und rotierten gegenläufig mit vom Atmosphärendruck abhängiger, variabler Drehzahl von etwa 2400 Umdrehungen bis zu maximal 2700 Umdrehungen pro Minute.[56][57]
Die Lithium-Ionen-Akkus wurden im August 2020 während des Flugs zum Mars in einem acht Stunden dauernden Vorgang überprüft und vollgeladen. Der vorher niedrige Ladezustand von 35 % sollte in Anbetracht der langen Flugzeit eine optimale Lebensdauer der Akkus sicherstellen.[58]
Die Flugroute bzw. die Steuerungsbefehle (Algorithmen) erhielt die Helikopterdrohne vor dem Flug. Die Übermittlung der Steuerbefehle zum Mars dauerte etwa acht Minuten.[59] Die Orientierung und Navigation während des Flugs des Helikopters funktionierte autonom, da die Signallaufzeit zur Erde zu lang war. Dazu wurden Kamera, Laserhöhenmesser[60] und Trägheitssensoren verwendet.[51] Die Steuersoftware ist Open Source[61] und das Betriebssystem der Drohne war Linux.[62] Die Kommunikation mit dem Rover erfolgte über das ZigBee-Protokoll.[63]
Als Hommage an den ersten Motorflug des Wright Flyer auf der Erde hatten Wissenschaftler des NASA Jet Propulsion Laboratory an der Mars-Drohne an einem Kabel unter einem ihrer Sonnenkollektoren ein kleines Stück der Stoffbespannung einer Tragfläche des Original-Flugzeugs der Gebrüder Wright von 1903 befestigt. Es war das zweite Stück des Wright Flyers, das in den Weltraum flog. Ein ähnliches Mini-Stück vom Flügel wurde während der Apollo-Missionen zum Mond gebracht.[64]
Mögliche Nachfolgemissionen
[Bearbeiten | Quelltext bearbeiten]
Es gibt Pläne, das vom Rover gewonnene Marsgestein mit einer darauf folgenden Mars-Sample-Return-Mission zur Erde zu bringen. Dazu sollen mehrere etwa 15 g schwere Gesteinsproben in Behältern hermetisch versiegelt werden (43 Behälter sind an Bord). Diese sollen dann im Rover gesammelt und an dafür günstigen Orten auf der Marsoberfläche abgelegt werden. So sind die Probenbehälter auch im Falle eines Ausfalls des Rovers für die spätere Abholung weiter zugänglich. Bei nachfolgenden Missionen könnten sie zur Erde zurückgebracht werden.[65]
Da der Rover auch Methoden zur Gewinnung von Sauerstoff aus der Marsatmosphäre prüft, nach anderen Ressourcen (z. B. unterirdischem Wasser) sucht sowie Umweltbedingungen wie Wetter und Staub untersucht, ist die Mission Bestandteil der Vorbereitung für einen bemannten Marsflug.[4]
Außerdem wird erwogen, in Zukunft eine größere, mit mehreren wissenschaftlichen Instrumenten ausgestattete Helikopterdrohne zum Mars zu schicken, den Mars Science Helicopter.[66]
Trivia
[Bearbeiten | Quelltext bearbeiten]- Am rückwärtigen Bereich von Perseverance wurde eine Aluminiumplatte montiert, mit einer Abbildung, auf der Erde und Mars durch Strahlen der Sonne verbunden sind. In den Sonnenstrahlen stehen in Morsezeichen die Worte „explore as one“ (zu deutsch: „Erkunde als Einheit“), eine Anspielung auf die Pioneer-Plaketten und Voyager Golden Records. Über dieser Gravur befinden sich drei fingernagelgroße Siliziumchips und rechts davon eine eckige Klammer mit „10,932,295 Explorers“. Die NASA ermöglichte im Rahmen einer „Send Your Name to Mars“-Kampagne (wie bei Curiosity zuvor), dass interessierte Personen ihren Namen darauf verewigen lassen konnten. Insgesamt wurden während des Registrierungszeitraums 10.932.295 Namen eingereicht und mittels Elektronenstrahl eingraviert. Ferner gelangten auch 155 Essays, die es ins Finale des „Name the Rover“-Wettbewerbs schafften, auf die Mikrochips.[67]
- Der Fallschirm der Abstiegsstufe war wie üblich rot-weiß gestreift, um leichter zu erkennen, ob er sich vollständig entfaltet hat und nicht verdreht ist. Bei Mars 2020 sind die Streifen allerdings unregelmäßig angeordnet. Dies wurde als versteckter Binärcode definiert und entschlüsselt – die roten Streifen entsprechen der „1“ und die weißen der „0“. Unter Verwendung des ASCII-Codes lassen sich aus den drei inneren Ringen die Worte „dare mighty things“ (zu deutsch: „Große Dinge wagen“), das Motto des Jet Propulsion Laboratory (JPL), interpretieren. Der äußere vierte Ring ergibt die Geokoordinaten des JPL in La Cañada Flintridge (34° 11′ 58″ N, 118° 10′ 31″ W).[68][69]
- Auf der linken Seite von Perseverance befindet sich eine 8 cm × 13 cm große Aluminiumplatte mit einem Äskulapstab drauf, der die Erde hält. Die NASA würdigt damit die Mitarbeiter im Gesundheitswesen und ihre Arbeit während der Corona-Pandemie.[70]
- Auf der Oberseite von Perseverance befindet sich ein „Familienporträt“ aller vorherigen Marsrover (Sojourner, Spirit, Opportunity, Curiosity) sowie Perseverance und Ingenuity selbst.[71]
- Zur Kalibrierung der WATSON-Kamera dient auch eine Münze aus Polycarbonat. Darauf steht die Adresse des berühmten Detektivs: „221bBaker“. Die Münze ist zugleich eine Geocoin für Geocacher.[72]
- An einem Draht befestigt trägt der Mars-Helikopter ein kleines Stück Stoff vom Flugzeug der Gebrüder Wright, die 1903 den ersten Motorflug auf der Erde schafften.[73][74]
- Einen Tag vor der Landung auf dem Mars wurde im Hubschraubermuseum Bückeburg ein Modell der Ingenuity im Maßstab 1:1 der Öffentlichkeit vorgestellt.[75]
-
 Plakette mit den drei Mikrochips, auf denen die Personennamen und Essays eingraviert sind
Plakette mit den drei Mikrochips, auf denen die Personennamen und Essays eingraviert sind -
 Der entfaltete Fallschirm während der Landung
Der entfaltete Fallschirm während der Landung -
 Plakette mit Verweis auf die Corona-Pandemie
Plakette mit Verweis auf die Corona-Pandemie -
 Das „Familienporträt“ der Marsrover
Das „Familienporträt“ der Marsrover




Galerie
[Bearbeiten | Quelltext bearbeiten]- Rover
-

-
![Technischer Aufbau des Rovers – 3D-CAD-Modell[76]](//upload.wikimedia.org/wikipedia/commons/thumb/c/c2/Computer-Design_Drawing_for_NASA%27s_2020_Mars_Rover.jpg/296px-Computer-Design_Drawing_for_NASA%27s_2020_Mars_Rover.jpg)

![Technischer Aufbau des Rovers – 3D-CAD-Modell[76]](/wiki/Datei:Computer-Design_Drawing_for_NASA%27s_2020_Mars_Rover.jpg)
- Zusammenbau Raumsonde – Details
-
 Marschflug-Modul – Zusammenbau 1
Marschflug-Modul – Zusammenbau 1 -
 Abstiegsstufe – Zur Landung auf der Marsoberfläche 2
Abstiegsstufe – Zur Landung auf der Marsoberfläche 2 -
 Abstiegsstufe – Zur Prüfung des Vehikelschwerpunkts 3
Abstiegsstufe – Zur Prüfung des Vehikelschwerpunkts 3 -
 Abstiegsstufe – Blick von oben 4
Abstiegsstufe – Blick von oben 4 -
 Hitzeschild von oben betrachtet
Hitzeschild von oben betrachtet -
 Blick unter das Marschflug-Modul
Blick unter das Marschflug-Modul -
 Blick von unten auf die Raumsonde 5
Blick von unten auf die Raumsonde 5 -
 Umgedrehtes Marschflug-Modul 6
Umgedrehtes Marschflug-Modul 6








- Instrumente des Rovers – Details
-
 Instrumente des Rovers (künstlerische Darstellung, englisch) 7
Instrumente des Rovers (künstlerische Darstellung, englisch) 7 -
 Kühlsystem der Radionuklidbatterie (MMRTG) – Mitte-rechts 8
Kühlsystem der Radionuklidbatterie (MMRTG) – Mitte-rechts 8 -
 Radionuklidbatterie (MMRTG) des Mars 2020
Radionuklidbatterie (MMRTG) des Mars 2020 -
 Innere Verkabelung und Kabel des Rovers – Fahrzeugunterseite
Innere Verkabelung und Kabel des Rovers – Fahrzeugunterseite -
 Probenröhrchen bei der Montage mit dem Rover
Probenröhrchen bei der Montage mit dem Rover -
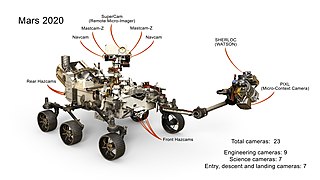 23 Kameras des Rovers (künstlerische Darstellung, englisch) 9
23 Kameras des Rovers (künstlerische Darstellung, englisch) 9 -

-

-

-
 Einbau des MOXIE – Mars Oxygen ISRU Experiment – in den Mars Rover
Einbau des MOXIE – Mars Oxygen ISRU Experiment – in den Mars Rover -
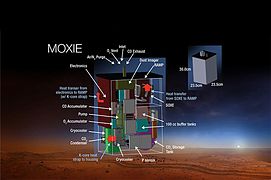 Aufbau des MOXIE (künstlerische Darstellung, englisch)
Aufbau des MOXIE (künstlerische Darstellung, englisch)











- Anmerkungen

Siehe auch
[Bearbeiten | Quelltext bearbeiten]Dokumentation
[Bearbeiten | Quelltext bearbeiten]- Perseverance – Ein Jahr auf dem Mars. Regie: Alain Tixier, ARTE F, Frankreich, 53 Minuten, 2022
Weblinks
[Bearbeiten | Quelltext bearbeiten]- NASA-Website zur Mars-2020-Mission (englisch)
- NASA-Bildarchiv: Kamerarohdaten von Perserverance Rover und Ingenuity Helikopter
- Bildarchiv der Arizona State University: Aufnahmen der Mastcam-Z in zwei unterschiedlichen Kalibrierungen
- Bildarchiv: Farbkalibrierte Aufnahmen von Ingenuity Helikopter und Perseverance Rover Navcam, Hazcam, Watson-Kameras in Ultra HDR
Einzelnachweise
[Bearbeiten | Quelltext bearbeiten]- ↑ Launch – Mars 2020 Mission, Perseverance Rover Launch. mars.nasa.gov, abgerufen am 5. Juli 2020 (englisch).
- ↑ a b pgo/dpa: Nasa gibt grünes Licht für Start des Marsrover „Perseverance“. DER SPIEGEL – Wissenschaft, 27. Juli 2020, abgerufen am 27. Juli 2020.
- ↑ NASA Television Upcoming Events. Watch NASA TV. In: nasa.gov. 22. Februar 2020, abgerufen am 22. Februar 2021 (englisch, NASA-TV-Programm).
- ↑ a b Mars 2020 Mission Overview. In: mars.nasa.gov. NASA, abgerufen am 2. August 2019 (englisch).
- ↑ a b Mike Wall: Jezero Crater or Bust! NASA Picks Landing Site for Mars 2020 Rover. In: www.space.com. 18. November 2018, abgerufen am 18. Februar 2021 (englisch).
- ↑ Touchdown! NASA’s Mars Perseverance Rover Safely Lands on Red Planet. In: mars.nasa.gov. 18. Februar 2021, abgerufen am 20. Februar 2021 (englisch).
- ↑ NASA Announces Landing Site for Mars 2020 Rover. In: NASA. 19. November 2018, abgerufen am 20. November 2018 (englisch).
- ↑ PIA19303: A Possible Landing Site for the 2020 Mission: Jezero Crater. In: photojournal.jpl.nasa.gov. National Aeronautics and Space Administration – NASA, abgerufen am 29. Mai 2016 (englisch).
- ↑ Landeplätze für neuen Marsrover ausgewählt. In: scinexx.de. 14. Februar 2017, abgerufen am 14. Februar 2017 (Quelle: NASA, 14. Februar 2017 – NPO).
- ↑ Christoph Seidler: Suche nach Lebensspuren auf dem Mars – Das kann der Nasa-Rover »Perseverance«. In: DER SPIEGEL. Abgerufen am 18. Februar 2021.
- ↑ Launch Vehicle – Mars 2020 Rover. In: mars.nasa.gov. Abgerufen am 21. Mai 2017 (englisch).
- ↑ Stephen Clark: Spaceflight Now – NASA delays Mars rover launch to no earlier than July 30. In: spaceflightnow.com. Abgerufen am 1. Juli 2020 (amerikanisches Englisch).
- ↑ a b Mars-Rover Perseverance: Landung geglückt. In: spektrum.de. Abgerufen am 19. Februar 2021.
- ↑ a b Dc Agle, Jet Propulsion Laboratory: Landing the Mars 2020 rover: Autopilot will avoid terrain hazards autonomously. In: phys.org. 2. Juli 2019, abgerufen am 19. Februar 2021 (englisch).
- ↑ Eric Berger: Here’s an example of the crazy lengths NASA goes to land safely on Mars. In: arstechnica.com. 7. Oktober 2019, abgerufen am 19. Februar 2021 (amerikanisches Englisch).
- ↑ a b Mars 2020 Perseverance Rover. In: mars.nasa.gov. Abgerufen am 18. Februar 2021 (englisch).
- ↑ WAS IST WAS – Wie weit ist der Mars von der Erde entfernt? In: wasistwas.de. Tessloff Verlag, abgerufen am 18. Februar 2021.
- ↑ a b Tanja Banner: „MARS 2020“-MISSION – Mars-Rover „Perseverance“ schickt spektakuläres 360-Grad-Panorama zur Erde. In: fr.de. 25. Februar 2021, abgerufen am 26. Februar 2021.
- ↑ Lonnie Shekhtman: NASA’s MAVEN Shrinking Its Orbit for Mars 2020 Rover. In: jpl.nasa.gov. Jet Propulsion Laboratory, Caltech, abgerufen am 19. Februar 2021 (englisch).
- ↑ NASA’s Mars Perseverance Rover Provides Front-Row Seat to Landing, First Audio Recording of Red Planet. In: jpl.nasa.gov. Jet Propulsion Laboratory, Caltech, 22. Februar 2021, abgerufen am 23. Februar 2021 (englisch).
- ↑ a b Alexandra Witze: Lift off! First flight on Mars launches new way to explore worlds. In: Nature. 19. April 2021, doi:10.1038/d41586-021-00909-z (nature.com [abgerufen am 20. April 2021]).
- ↑ a b Christoph Seidler: Erster Flug ist geglückt: Mars-Helikopter Ingenuity erfolgreich abgehoben. In: Der Spiegel. Abgerufen am 19. April 2021.
- ↑ Anm.: Erstmals wurde damit ein (menschengemachter) aerodynamisch erzeugter Auftrieb zum Aufsteigen eines Flugkörpers außerhalb der Erde genutzt. Eine aerodynamische Bremswirkung ist außerhalb der Erde, ebenfalls am Mars, zuvor jedoch schon genutzt worden.
- ↑ NASA’s Perseverance Mars Rover Extracts First Oxygen From Red Planet. In: mars.nasa.gov. Abgerufen am 22. April 2021 (englisch).
- ↑ Pressebericht Tagesschau vom 22. April 2021.
- ↑ Tony Greicius: NASA’s Perseverance Rover Successfully Cores Its First Rock. In: NASA.gov. 2. September 2021, abgerufen am 5. September 2021.
- ↑ Microphones – Microphones on the Perseverance Rover. In: mars.nasa.gov. Abgerufen am 3. Dezember 2019 (englisch).
- ↑ mars.nasa.gov: Hear Sounds From Mars Captured by NASA’s Perseverance Rover. Abgerufen am 20. Oktober 2021 (englisch).
- ↑ Janita Hämäläinen: Nasa-Rover »Perseverance«: So klingen die Sounds vom Mars. In: Der Spiegel. 20. Oktober 2021, ISSN 2195-1349 (spiegel.de [abgerufen am 20. Oktober 2021]).
- ↑ NASA Announces Mars 2020 Rover Payload to Explore the Red Planet as Never Before | Mars News. In: mars.nasa.gov. Abgerufen am 20. Mai 2017 (englisch).
- ↑ Mast-Mounted Camera System – Mastcam-Z. In: mars.nasa.gov. Abgerufen am 18. Juni 2020 (englisch): „Think of Mastcam-Z as the Perseverance rover’s main „eyes.“ It is located near the top of the rover’s mast (its „head“). It’s a camera system, and it has a Zoom capability – Z for the mark of zoom! What would you call it but Mastcam-Z?“
- ↑ SuperCam. In: mars.nasa.gov. Abgerufen am 9. April 2021 (englisch).
- ↑ Karen Northon: NASA Signs Agreements to Advance Journey to Mars. In: nasa.gov. 16. Juni 2015, abgerufen am 19. Juni 2020 (englisch).
- ↑ Mars 2020 Rover’s PIXL to Focus X-Rays on Tiny Targets. In: jpl.nasa.gov. Jet Propulsion Laboratory – JPL, abgerufen am 19. Juni 2020 (englisch).
- ↑ David R. Thompson, Abigail Allwood, Christopher Assad, David Flannery, Robert Hodyss, Emily Knowles, Lawrence Wade: Adaptive sampling for rover x-ray lithochemistry. ( vom 8. August 2014 im Internet Archive). PDF; 3,2 MB. In: davidraythompson.com, abgerufen am 19. Juni 2020 (englisch).
- ↑ SHERLOC to Micro-Map Mars Minerals and Carbon Rings. In: jpl.nasa.gov. Jet Propulsion Laboratory, abgerufen am 19. Juni 2020 (englisch).
- ↑ 11thInternationalGeoRamanConference(2014). (PDF; 320 kB) In: hou.usra.edu. Universities Space Research Association – USRA Houston, abgerufen am 20. Juni 2020 (englisch).
- ↑ NASA TechPort. In: techport.nasa.gov. NASA, abgerufen am 19. Juni 2020 (englisch).
- ↑ a b c Mars Environmental Dynamics Analyzer (MEDA). In: mars.nasa.gov. Abgerufen am 18. August 2020 (englisch).
- ↑ Space Technology: Game Changing Development | In-Situ Resource Utilization (ISRU). NASA, 2. April 2015, archiviert vom (nicht mehr online verfügbar) am 2. April 2015; abgerufen am 12. Dezember 2022 (englisch).
- ↑ a b MEDA for Scientists (Mars Environmental Dynamics Analyzer). In: mars.nasa.gov. Abgerufen am 18. August 2020 (englisch).
- ↑ Emily Chung: Mars 2020 rover’s RIMFAX radar will ‘see’ deep underground. In: cbc.ca. 19. August 2014, abgerufen am 20. Juni 2020 (englisch).
- ↑ Radar Imager for Mars’ Subsurface Exploration (RIMFAX). In: mars.nasa.gov. Abgerufen am 19. Juni 2020 (englisch).
- ↑ NASA’s Perseverance Rover Will Peer Beneath Mars’ Surface. In: ffi.no. FFI (Forsvarets forskningsinstitutt) – Forschungsabteilung der norwegischen Streitkräfte, 13. Oktober 2020, abgerufen am 26. Februar 2021 (englisch, Mitteilung des Norwegischen Verteidigungsforschungsinstitutes vom 13. Oktober 2020): „This article was first published on Nasa’s web-page on October 8. 2020.“
- ↑ Norbert Lossau: Dieser Hubschrauber soll über dem Mars fliegen. In: welt.de. 21. April 2020, abgerufen am 21. April 2020.
- ↑ Mars Helicopter – Quick Facts. In: mars.nasa.gov. Abgerufen am 23. April 2020 (englisch).
- ↑ Alabama High School Student Names NASA’s Mars Helicopter. In: mars.nasa.gov. 29. April 2020, abgerufen am 29. April 2020 (englisch): „Vaneeza Rupani’s essay was chosen as the name for the small spacecraft, which will mark NASA’s first attempt at powered flight on another planet.“
- ↑ Karen Northon: Mars Helicopter to Fly on NASA’s Next Red Planet Rover Mission. In: www.nasa.gov. 11. Mai 2018, abgerufen am 30. April 2019 (englisch).
- ↑ Jonathan Amos: Nasa prepares tiny chopper for Mars flight. In: BBC News. 29. August 2019 (englisch, bbc.com [abgerufen am 19. Juni 2020]).
- ↑ NASA’s Ingenuity Mars Helicopter Completes 50th Flight auf Jet Propulsion Laboratory
- ↑ a b Meet Ingenuity: The high-tech helicopter designed to fly on Mars. Abgerufen am 20. April 2021.
- ↑ a b After Three Years on Mars, NASA’s Ingenuity Helicopter Mission Ends. Pressemeldung des JPL vom 25. Januar 2024.
- ↑ Alexander Stirn: Ingenuity fliegt und fliegt und fliegt. In: spektrum.de. 19. April 2022, abgerufen am 24. April 2022.
- ↑ Karin Schlott: 50. Flug von Ingenuity: Totgesagte fliegen länger. In: spektrum.de. 14. April 2023, abgerufen am 14. April 2023.
- ↑ INGENUITY MARS HELICOPTER – Landing Press Kit. (PDF; 5,6 MB) In: jpl.nasa.gov. NASA, abgerufen am 26. Februar 2021 (englisch, Quick Facts, Seite 12).
- ↑ Ingenuity Mars Helicopter: Landing Press Kit. (PDF) In: jpl.nasa.gov. Januar 2020, abgerufen am 5. April 2021 (englisch).
- ↑ Ingenuity fliegt und fliegt und fliegt. In: spektrum.de. 19. April 2022, abgerufen am 12. Mai 2022.
- ↑ Tony Greicius: NASA’s Ingenuity Mars Helicopter Recharges Its Batteries in Flight. In: nasa.gov. 13. August 2020, abgerufen am 18. August 2020 (englisch).
- ↑ Christoph Seidler: Wie fliegt es sich auf dem Mars? Der Chefpilot des Nasa-Helikopters »Ingenuity« im Interview. In: Der Spiegel. Abgerufen am 9. Juni 2021.
- ↑ LIDAR-Lite v3. Typenblatt des verwendeten „LIDAR-Lite v3“ Optical Distance Measurement Sensor der Firma Garmin Ltd. / USA, abgerufen am 20. April 2021.
- ↑ A flight software and embedded systems framework. Abgerufen am 22. April 2021.
- ↑ Ingenuity: Linux hebt auf dem Mars ab. Abgerufen am 20. April 2021.
- ↑ Zigbee inside the Mars Perseverance Mission and your smart home. Abgerufen am 6. September 2021.
- ↑ Gail Iles: So a helicopter flew on Mars for the first time. A space physicist explains why that’s such a big deal. Artikel in space.com vom 22. April 2021, abgerufen am 22. April 2021.
- ↑ Surface Operations for Perseverance – MARS 2020 ROVER Depot Caching Strategy. In: mars.nasa.gov. Abgerufen am 3. Januar 2021 (englisch).
- ↑ Jeff Foust: NASA studying larger Mars helicopters. In: spacenews.com. 24. Juni 2021.
- ↑ Nearly 11 Million Names of Earthlings are on Mars Perseverance. NASA, 23. Februar 2021, abgerufen am 7. März 2021 (englisch).
- ↑ Kenneth Chang: NASA Sent a Secret Message to Mars. Meet the People Who Decoded It. In: New York Times. 26. Februar 2021, abgerufen am 6. März 2021 (englisch).
- ↑ Viola Ulrich: Diese verschlüsselten Botschaften verstecken sich am Mars-Rover. In: Welt online. 25. Februar 2020, abgerufen am 6. März 2021.
- ↑ Mike Wall: NASA’s next Mars rover carries tribute to healthcare workers fighting coronavirus. In: space.com. 17. Juni 2020, abgerufen am 6. März 2021 (englisch).
- ↑ Hanneke Weitering: NASA’s Perseverance rover on Mars is carrying an adorable ‘family portrait’ of Martian rovers. In: space.com. 25. Februar 2021, abgerufen am 6. März 2021 (englisch).
- ↑ Trackable TB5EFXK – Mars Perseverance Rover. In: Geocaching.com. 21. Juli 2020, abgerufen am 1. April 2021 (englisch).
- ↑ „Ingenuity“: Heli-Flug auf dem Mars: Countdown läuft. In: orf.at. 9. April 2021, abgerufen am 19. April 2021.
- ↑ Gebrüder-Wright-Moment: Erster Flug auf anderem Planeten geglückt. In: orf.at. 19. April 2021, abgerufen am 19. April 2021.
- ↑ Am 17. Februar 2021 im Hubschraubermuseum gelandet. Abgerufen am 24. Mai 2021.
- ↑ NASA’s Next Mars Rover Progresses Toward 2020 Launch. In: mars.nasa.gov. 15. Juli 2016, abgerufen am 10. Dezember 2022 (englisch).

„Mars“-Raumsonden (1960–1973) | Mariner 3,4,6–9 (1964–1971) | Zond 2 (1964) | Viking 1,2 (1975) | Fobos 1,2 (1988) | Mars Observer (1993) | Mars Global Surveyor (1996) | Mars 96 (1996) | Mars Pathfinder mit Sojourner (1996) | Nozomi (1998) | Mars Climate Orbiter (1998) | Mars Polar Lander mit Deep Space 2 (1999) | 2001 Mars Odyssey (2001) | Mars Express mit Beagle 2 (2003) | Mars Exploration Rover mit Spirit (2003) und Opportunity (2003) | Mars Reconnaissance Orbiter (2005) | Phoenix (2007) | Phobos-Grunt (2011) | Yinghuo-1 (2011) | Curiosity (2011) | Mars Orbiter Mission (2013) | MAVEN (2013) | ExoMars Trace Gas Orbiter (2016) | Schiaparelli (2016) | InSight (2018) | al-Amal (2020) | Tianwen-1 mit Zhurong (2020) | Perseverance mit Ingenuity (2020)
Kursiv geschriebene Missionen sind aktiv.
Geplante Missionen
Escapade (2024) |
Martian Moons Exploration mit Idefix (2026) |
Tianwen-3 (2028) |
ExoMars Rosalind Franklin (frühestens 2028)
Gestrichene Missionen: Mars Surveyor 2001 | Mars Telecommunications Orbiter | Mars Science and Telecommunications Orbiter | P5A | Red Dragon | diverse Probenrückführmissionen
(Siehe auch: Liste künstlicher Objekte auf dem Mars | Chronologie der Marsmissionen)