Radar
Radar [] ist die Abkürzung für radio detection and ranging (frei übersetzt „funkgestützte Ortung und Abstandsmessung“) oder radio direction and ranging (frei übersetzt „funkgestützte Richtungs- und Abstandsmessung“),[1] zwischenzeitlich radio aircraft detection and ranging (frei übersetzt „funkbasierte Flugzeugortung und -abstandsmessung“) und ist die Bezeichnung für verschiedene Erkennungs- und Ortungsverfahren und -geräte auf der Basis elektromagnetischer Wellen im Radiofrequenzbereich (Funkwellen).
Der Ausdruck Radar hat die ursprüngliche deutsche Bezeichnung Funkmeßtechnik beziehungsweise Funkmessgerät ersetzt.

Allgemeines
[Bearbeiten | Quelltext bearbeiten]
Ein Radargerät ist ein Gerät, das ein sogenanntes Primärsignal als gebündelte elektromagnetische Welle aussendet, die von Objekten reflektierten Echos als Sekundärsignal empfängt und nach verschiedenen Kriterien auswertet. So können Informationen über die Objekte gewonnen werden. Meist handelt es sich um eine Ortung (Bestimmung von Entfernung und Winkel). Es gibt je nach Einsatzzweck unterschiedliche Radarprinzipien wie das Wetterradar, das harmonische Radar und das Überhorizontradar.
Aus den empfangenen, vom Objekt reflektierten Wellen können u. a. folgende Informationen gewonnen werden:
- der Azimut des Objekts an dem das Radar-Signal reflektiert wurde bezogen auf den Standort des RADAR-Sensors, oder Winkel bzw. die Richtung zum Objekt bezogen auf den Standort des RADAR-Sensors
- die Slant-Range (dt. Schräg-Entfernung) zwischen dem Radar-Sensor zum Objekt an dem das Radar-Signal reflektiert wird, gemessen aus der Laufzeit zwischen Aussendung des Radar-Signals und Empfang der Reflexion am Ziel-Objekt, oder aus der Frequenz oder Phasenverschiebung
- die Relativbewegung zwischen Sender und Objekt – sie kann durch den Doppler-Effekt aus der Verschiebung der Frequenz des reflektierten Signals berechnet werden
- die effektive Reflexionsfläche, auch Radarquerschnitt genannt
- das Aneinanderreihen einzelner Messungen liefert die Wegstrecke und die Absolutgeschwindigkeit des Objektes
- bei guter Auflösung des Radars können Konturen des Objektes erkannt werden (z. B. der Flugzeugtyp) oder sogar Bilder gewonnen werden (Erd- und Planetenerkundung).
Die sich ausbreitende elektromagnetische Welle des Radars wird mitunter auch als Radarstrahlung[3] bezeichnet. Man spricht auch von einem Radarstrahl,[4] insbesondere wenn die Abstrahlung von dem Radargerät aufgrund des Antennenentwurfs weitgehend gebündelt in eine Richtung erfolgt. Die Strahlungscharakteristik der Antenne hat dann eine sogenannte Keulenform.
Da die Wellenlänge des Radars je nach Anwendung und Stand der Technik im Bereich der Funkwellen im Kurz- bis Mikrowellenbereich liegt, wurde ursprünglich die Bezeichnung Funkmeßtechnik (kurz Funkmeß) verwendet. Sie wurde nach dem Zweiten Weltkrieg in der Bundesrepublik Deutschland durch den Begriff Radar ersetzt. In der DDR wurde in der Fachsprache weiterhin von Funkmeßtechnik gesprochen.
Geschichte
[Bearbeiten | Quelltext bearbeiten]Entdeckung
[Bearbeiten | Quelltext bearbeiten]

1886 stellte der deutsche Physiker Heinrich Hertz beim experimentellen Nachweis elektromagnetischer Wellen fest, dass Radiowellen an metallischen Gegenständen reflektiert werden. 1900 wurde von Nikola Tesla ein Rückstrahlortungsgerät vorgeschlagen.
Die ersten Versuche zur Ortung mit Hilfe von Radiowellen führte der deutsche Hochfrequenztechniker Christian Hülsmeyer im Jahr 1904 durch. Er fand heraus, dass von Metallflächen zurückgeworfene elektromagnetische Wellen verwendet werden können, um entfernte metallische Objekte zu detektieren. Sein Telemobiloskop zur Erkennung von Schiffen gilt als Vorläufer heutiger Radarsysteme und wurde am 30. April 1904 zum Patent angemeldet,[5] das wegen fehlender technischer Voraussetzungen (Elektronenröhre noch nicht verfügbar) nicht realisierbar war. Der Nutzen der Radartechnik wurde jedoch zunächst nicht erkannt und so geriet die Erfindung vorläufig in Vergessenheit.
Entwicklung moderner Radarsysteme im Zweiten Weltkrieg
[Bearbeiten | Quelltext bearbeiten]Die Entdeckung und Entwicklung der Radartechnik kann weder ein einzelner Staat noch eine einzelne Person für sich verbuchen. Man muss sie als eine Anhäufung vieler Entwicklungen und Verfeinerungen ansehen, an denen Wissenschaftler mehrerer Nationen parallel Anteil hatten.
Der Durchbruch der Radartechnik folgte kurz vor und während des Zweiten Weltkrieges. Im Zuge der militärischen Aufrüstung in dieser Zeit wurden ab Mitte der 1930er Jahre in mehreren Ländern unabhängig voneinander intensiv Radargeräte und -systeme entwickelt, besonders von Deutschen und Briten. Auch in Australien gab es erfolgreiche Tests mit einem Radargerät.[6] Beim Kriegsbeginn 1939 gab es auch in den USA, in der Sowjetunion, in Frankreich, Japan, Italien und den Niederlanden Radaranlagen.
Im September 1935 präsentierte die GEMA aus Berlin als erste ein voll funktionsfähiges Funkmessgerät. Auf deutscher Seite wurden viele verlegbare Radaranlagen entwickelt und gebaut. Neben der GEMA, die Systeme wie Freya, Mammut, Wassermann und Seetakt entwickelte, war auch Telefunken mit den Systemen Würzburg und Würzburg-Riese maßgeblich an der deutschen Radartechnik beteiligt. Am 18. Dezember 1939 flog die Luftwaffe ihren ersten radargeleiteten Abfangeinsatz gegen 22 britische Bomber, die einen Angriff auf Wilhelmshaven flogen. Beim Luftgefecht über der Deutschen Bucht gelang es ihr, zwölf davon abzuschießen und drei schwer zu beschädigen. Das deutsche Abwehrsystem gegen Bombergeschwader, die Kammhuber-Linie, führte über eine Länge von mehr als 1000 km von Dänemark bis Nordfrankreich.
Die Briten errichteten ab 1936 mit Chain Home ebenfalls eine Kette von Radarstationen an der Ostküste, die auf einer anderen Wellenlänge als die der Deutschen arbeitete und von diesen zunächst nicht erkannt wurde. Diese Radarstationen waren in einem Luftverteidigungsnetzwerk eingebunden. Schon ab 1939 wurde das System mit einem Freund-Feind-Erkennungsgerät in den Flugzeugen ergänzt. Da dieses ursprüngliche System Tiefflieger nur sehr schlecht orten konnte, wurde mit Chain Home Low ein zweites System mit höheren Sendefrequenzen aufgebaut und in das Netzwerk integriert.
Eine Wende im U-Boot-Krieg brachte die Entwicklung eines leistungsfähigen Magnetrons an der Universität Birmingham, welches ab 1940 für den Einsatz in kleinen mobilen Radargeräten zur Verfügung stand. Ende Januar 1943 setzen die Briten bei einem Angriff auf Hamburg erstmals ein solches mobiles Radarsystem in Flugzeugen ein, welches zur Navigation und Zielsuche verwendet wurde (H2S). Beide Seiten entwickelten sogenannte Düppel, einfache Metallfolienstreifen, um die gegnerischen Radarsysteme zu stören. Schnell wurden jedoch verbesserte Systeme entwickelt, die diese Störungen herausfiltern konnten.
Forschung nach dem Zweiten Weltkrieg
[Bearbeiten | Quelltext bearbeiten]In Deutschland kam die Forschung auf dem Gebiet Radar nach dem Krieg vollständig zum Erliegen. Die Alliierten verboten diese bis 1950. Erhebliche Fortschritte machte die Forschung in der Folgezeit insbesondere in den USA, wo zahlreiche neue theoretische Ansätze und innovative Bauteile wie Halbleiter entwickelt wurden. Als ein Beispiel sei das Synthetic Aperture Radar aus dem Jahr 1951 genannt.
Auch an Bord von zivilen Flugzeugen und Schiffen gehören Bordradare heute zur Standardausrüstung. Eine der ersten und bis heute wichtigsten zivilen Anwendungen ist die Überwachung des Luftverkehrs mittels Air Traffic Control (ATC).
Bereits Ende der 1970er Jahre entstanden erste Systeme von Abstandswarnradaren für den Automobilbereich. Heute sind ACC-Systeme (Adaptive Cruise Control = Abstandsregelanlage) bei PKWs und LKWs weit verbreitet; meist in Verbindung mit einem Tempomat. Jedwede Form von autonomem Fahren benötigt ein ACC-System.
In der Raumfahrt wird Radartechnik seit Mitte der 1990er zur Vermessung der Erde und anderer Planeten sowie militärisch genutzt. Zur Erfassung von Wetterdaten werden zudem Wetterradare eingesetzt.
Einsatzgebiete
[Bearbeiten | Quelltext bearbeiten]

Radargeräte wurden für verschiedene Verwendungszwecke entwickelt:
- Rundsichtradar; Überwachung von Schiffs- und Flugverkehr (auch Frühwarnstationen, z. B. das Freya-Radar), entweder als feste Station wie beim Flugsicherungsradar oder bei der Schifffahrtsverkehrssicherung, oder mobil auf Fahr- und Flugzeugen (AWACS) sowie auf Schiffen (ARPA-Anlage).
- PAR (Precision Approach Radar) für den GCA (Ground Controlled Approach) bei dem der Anflug-Lotse dem Luftfahrzeugführer über Flugfunk Anweisungen für den Landeanflug durchgibt.
Boote können zur besseren Sichtbarkeit mit einem Radarreflektor ausgerüstet werden. - Radargeräte zur Zielverfolgung (Ground Control Intercept) als Radarstellung der Luftverteidigung, bodengebunden (z. B. Würzburg, Würzburg-Riese) oder an Bord von Fahr- und Flugzeugen, Schiffen und Raketen
- Bordradar auf Flugzeugen (Radarnase), um Wetterfronten zu entdecken (Wetterradar) oder andere Flugzeuge und Raketen zu entdecken (Antikollisionssysteme, Zielsuchradar)
- Radar Altimeter (RA) an Bord von Luftfahrzeugen dienen zur Messung der Höhe über Grund während des Landeanflugs.
- Bodenradar (Flugfeldüberwachungsradar) zur Überwachung der Positionen von Flug- und Fahrzeugen auf den Rollwegen eines Flughafens
- Bodenradar (Georadar) zur zerstörungsfreien Untersuchung der oberen Schichten der Erdkruste
- Radar zur Fernerkundung und militärischer Aufklärung, um von Flugzeugen oder Satelliten aus bei schlechter Sicht (bzw. bei Nacht und durch Wolken) am Boden Einzelheiten abbilden und auch vermessen zu können (z. B. mittels Synthetic Aperture Radar).
- Artillerieradar, zur Feuerkorrektur der eigenen Artillerie und Raketen sowie der Ortung der feindlichen Artilleriestellungen
- Radarastronomie: Messung der Astronomischen Einheit durch Bahnbestimmung von Planeten und Asteroiden, Kartierung dieser Körper sowie Aufspüren und Verfolgen von Weltraummüll.
- Wetterradar, Erkennung und Ortung von Schlechtwetterfronten (Niederschlagsradar), Messung der Windgeschwindigkeit
- Windprofiler sind vertikal strahlende Radar-Sensoren zur Erfassung der Windgeschwindigkeit sind vertikal strahlende PSR-Sensoren die optional auch die Temperatur messen können.
- Radar-Bewegungsmelder zur Überwachung von Gebäuden und Gelände, z. B. als Türöffner oder Lichtschalter
- Radargeräte zur Messung der Geschwindigkeit im Straßenverkehr.
- Kfz-Technik: radarbasierte Abstandshalter ACC (Adaptive Cruise Control) bzw. ADC, Kopplung mit Notbremsfunktion in PSS1 bis PSS3 (Predictive Safety System), Nahbereichsfunktionen wie Abstandswarner und automatisches Einparken (24 GHz, Kurzpuls im Bereich 350–400 Pikosekunden, sowie im 77–79-GHz-Band).
- Auch Züge messen Wegstrecke und Geschwindigkeit mit Doppler-Radargeräten (im ISM-Band um 24 GHz).
- Radarsensoren als Bewegungs- oder Füllstandsmelder
- Bioradar zur Detektion von lebenden Personen und deren Körperbewegung, wie beispielsweise bei Verschütteten in Lawinen, auf Distanzen von einigen Metern.
- Windenergie: zur Detektierung von Luftfahrzeugen, um die als störend betrachtete, nächtliche Luftfahrthindernisbefeuerung der Anlagen zu mindern. Geplant ist der Einsatz von gepulsten L- und X-Band Radarsystemen.
- Vogel Radar dient zur Erfassung von Vogelzug, zum Einsatz können hierzu verschiedene PSR-Sensoren kommen.[7]
Nach dem Zweiten Weltkrieg kam auch die Lenkung radargesteuerter Waffen wie Flugabwehrraketen dazu. Außerdem wurde das Radar auch für die zivile Schiff- und Luftfahrt eingesetzt. Die heutige Passagierluftfahrt wäre ohne Luftraumüberwachung durch Radar nicht denkbar. Auch Satelliten und Weltraumschrott werden heute durch Radar überwacht.
Als die Radargeräte leistungsfähiger wurden, entdeckte auch die Wissenschaft diese Technik. Wetterradargeräte helfen in der Meteorologie oder an Bord von Flugzeugen bei der Wettervorhersage. Mittels großer Stationen können vom Boden aus Radarbilder vom Mond, der Sonne sowie einigen Planeten erzeugt werden. Umgekehrt kann auch die Erde vom Weltraum aus durch satellitengestützte Radargeräte vermessen und erforscht werden.
-
 Deutsches Feuerleitradar Würzburg-Riese FuMG 65, etwa 1940–1943
Deutsches Feuerleitradar Würzburg-Riese FuMG 65, etwa 1940–1943 -
 Doppler-Radarantenne für den Kfz-Einsatz
Doppler-Radarantenne für den Kfz-Einsatz -
 Sturmfront auf einem Doppler-Radar-Schirm
Sturmfront auf einem Doppler-Radar-Schirm -
 Radarturm Hooksielplate ausgerüstet mit Radar- und Peilanlage, ist Teil des Schifffahrtsverkehrssicherungssystems Jade und Deutsche Bucht
Radarturm Hooksielplate ausgerüstet mit Radar- und Peilanlage, ist Teil des Schifffahrtsverkehrssicherungssystems Jade und Deutsche Bucht -
 Bordradar RP-21 Sapfir einer MiG-21
Bordradar RP-21 Sapfir einer MiG-21




.jpg)
Einteilung und Funktionsweise
[Bearbeiten | Quelltext bearbeiten]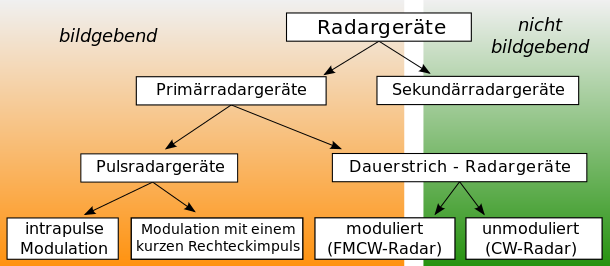
Aktive Radargeräte werden in bildgebend und nicht bildgebend eingeteilt. Ferner unterscheidet man zwischen Impuls- und Dauerstrichradargeräten sowie zwischen mono- und bistatischen Anlagen; bei letzteren sind Sender und Empfänger räumlich getrennt, was auf astronomische Entfernung eine höhere Empfindlichkeit erlaubt. Radarsender sind mittels Peilempfängern erkenn- und ortbar.
Als Primärradar werden Pulsradar-Geräte bezeichnet, die ausschließlich das passiv reflektierte Echo des Zieles auswerten. Es lassen sich neben der Entfernung auch die radiale Geschwindigkeit der Objekte und deren ungefähre Größe ermitteln. Auswertung reflektierter Oberwellen erlaubt Rückschlüsse auf den Flugzeugtyp.
Ein Sekundärradar umfasst ebenfalls ein Impulsradargerät, jedoch befinden sich an den Zielobjekten Transponder, die auf die Pulse reagieren und ihrerseits ein Signal zurücksenden. Hierdurch erhöht sich die Reichweite, die Objekte sind identifizierbar und können ggf. weitere Daten zurücksenden.
Peilempfänger, die die Quelle von Funkwellen (von Radar- und anderen Geräten und deren Störabstrahlung) zu militärischen Zwecken orten können, nennt man auch passives Radar. Ein passives Radar ist daher nicht anhand seiner Funkwellenaussendung zu entdecken.
Eine weitere Art von Radargeräten, die nur schwer zu entdecken sind, ist das Rauschradar, welches lange Pulse aussendet, welche wie zufällige Störstrahlung aussehen.
Impulsradar
[Bearbeiten | Quelltext bearbeiten]Entfernungsbestimmung mit dem Impulsverfahren
[Bearbeiten | Quelltext bearbeiten]
Ein Pulsradargerät sendet Impulse mit einer typischen Dauer im unteren Mikrosekundenbereich und wartet dann auf Echos. Die Laufzeit des Impulses ist die Zeit zwischen dem Senden und dem Empfang des Echos wird zur Entfernungsbestimmung genutzt. Für die Entfernung , die der Impuls zweimal zurückgelegt hat, gilt der Zusammenhang:



Die Gruppengeschwindigkeit ist näherungsweise gleich der Lichtgeschwindigkeit im Vakuum, da der Brechungsindex von Luft für Radiowellen sehr nahe an 1 ist. Je nach Reichweite des Radargerätes wird nach einem gesendeten Impuls einige Mikro- bis Millisekunden lang empfangen, bevor der nächste Impuls ausgesendet wird.

Auf dem klassischen Radarschirm beginnt die Auslenkung mit dem Sendeimpuls. Die Ausbreitungsgeschwindigkeit der elektromagnetischen Wellen im Raum ist maßstabsgerecht mit der Anzeige. Wird ein Echo empfangen, dann ist der Abstand des Echoimpulses auf dem Sichtgerät ein Maß für die Entfernung des reflektierenden Objektes (hier: des Flugzeugs) zum Radargerät.
Pulserzeugung
[Bearbeiten | Quelltext bearbeiten]Um in Pulsradar-Geräten die hohen Sendeleistungen im Megawattbereich zu erzeugen, welche zur Ortung z. B. über einige 100 km nötig sind, werden auch heute Magnetrons verwendet. Dazu wird ein Magnetron z. B. mittels Trigatron, Thyratron oder neuerdings auch Halbleiterschaltern gepulst betrieben.
Da sich die Sendefrequenz eines Magnetrons in Abhängigkeit von Temperatur und Betriebszustand ändern kann, wird bei Messungen der relativen Radialgeschwindigkeit die Frequenzreferenz beim Empfang aus der Sendefrequenz abgeleitet (siehe pseudokohärentes Radar).
Stationäre Pulsradargeräte erreichten Leistungen bis zu 100 MW als Spitzenimpulsleistung. Moderne Radargeräte benötigen für Reichweiten von mehreren 100 km sehr viel weniger Energie und senden teilweise Pulse mit einer Pulsleistung unter einem Megawatt.
Bei der Verwendung vieler kleiner, in Verbund arbeitender Sender oder bei Geräten mit aktiven Phased-Array-Antennen kann auf die Röntgenstrahlen aussendenden Schaltröhren verzichtet werden.
Richtungsbestimmung
[Bearbeiten | Quelltext bearbeiten]Dreht man die Antenne eines Pulsradars, erhält man ein Rundsichtradar. Die scharfe Richtcharakteristik der Antenne wirkt sowohl beim Senden als auch beim Empfang. Aus der Abhängigkeit der Stärke des Echos von der Orientierung der Antenne kann sehr genau die Richtung bestimmt werden. Bekannteste Anwendungsgebiete eines solchen Rundsichtradars sind Luftraumüberwachung und Wetterradar.
Ein Flughafen-Rundsicht-Radar (ASR, Airport Surveillance Radar) kombiniert meist ein Primärradar mit einem Sekundärradar. Neben der allgemeinen Luftraumüberwachung hat es vor allem die Aufgabe, dem Anfluglotsen ein genaues Bild der Luftlage rund um den Flughafen zu liefern. Die Reichweite eines ASR beträgt üblicherweise 60 sm.
Ein Anflugradar besteht aus jeweils einer waagerecht und einer senkrecht bewegten Antenne und ermöglicht, Anflugwinkel, Anflugrichtung und Anflughöhe landender Flugzeuge zu bestimmen. Der Pilot erhält die Korrekturhinweise über Funk vom Bodenpersonal oder er hat ein Anzeigeinstrument an Bord, welches Abweichungen passiv anhand der empfangenen Radarimpulse angibt. Solche Instrumentenlandungen oder Blindlandungen sind besonders bei schlechter Sicht oder bei aus militärischen Gründen unbefeuerter oder getarnter Landebahn von Bedeutung. Kurz vor dem Aufsetzen ist jedoch Bodensicht erforderlich.
Das bodengestützte STCA-System (Short Term Conflict Alert) zur Kollisionsvermeidung verwendet das Luftraumüberwachungsradar. Es berechnet aus der Flugspur (Track) von Luftfahrzeugen die Wahrscheinlichkeit eines nahen Vorbeifluges (near miss) oder gar Zusammenstoßes und warnt optisch und akustisch den Fluglotsen.
Das Schwenken des Abtaststrahles eines Impulsradars kann statt durch die Ausrichtung der Antenne auch elektronisch durch phasengesteuerte Antennenarrays bewirkt werden. Damit können in schnellem Wechsel mehrere Objekte angepeilt und quasi simultan verfolgt werden.
Das Synthetic Aperture Radar erreicht eine hohe, entfernungsunabhängige Auflösung in Azimut. Die erforderliche Aperturgröße wird rechnerisch aus der realen Apertur einer kleinen, bewegten Antenne zusammengesetzt. Dazu muss die Bewegung der Antenne relativ zu dem beobachteten (starren) Objekt genau bekannt und die Phase der ausgesendeten Impulse kohärent zueinander sein. Erdsatelliten und Raumsonden verwenden solche Systeme zur Vermessung von Geländeprofilen.
Radarbaugruppen im Impulsradar
[Bearbeiten | Quelltext bearbeiten]Radarantennen
[Bearbeiten | Quelltext bearbeiten]

Die Antenne ist eines der auffälligsten Teile der Radaranlage. Die Antenne sichert durch das Antennendiagramm und ggf. eine Drehbewegung die erforderliche Verteilung der Sendeleistung im Raum. Die Antenne wird meist im Zeitmultiplexbetrieb verwendet. Während der Empfangszeit empfängt sie dann die reflektierte Energie.
Das Antennendiagramm muss sehr stark bündeln, damit ein gutes laterales und vertikales Auflösungsvermögen erreicht wird. Das Entfernungs-Auflösungsvermögen wird dagegen durch die Impulsdauer bestimmt. Im Falle einer mechanischen Raumabtastung wird die Antenne gedreht oder hin- und hergeschwenkt. Diese Bewegung kann ein erhebliches mechanisches Problem bereiten, weil die Antennenreflektoren bei großen Wellenlängen bzw. hoher Bündelung sehr große Dimensionen erreichen. Bei Radargeräten sind folgende Antennenbauformen üblich:
- Passive Phased-Array-Antennen (siehe auch Gruppenantenne, Panelantenne)
- Active Electronically Scanned Array (AESA), wie vor, jedoch mit aktiver elektronischer Ansteuerung der Einzelelemente, elektronische Strahlschwenkung, Zielverfolgung
- Parabolantennen
Modernere Radargeräte mit Multifunktionseigenschaften verwenden immer eine Phased-Array-Antenne, ältere Gerätesysteme meist die Parabolantenne, die zur Erzeugung eines Cosecans²-Diagramms von der idealen Parabolform abweicht.
Radarsender
[Bearbeiten | Quelltext bearbeiten]Eine in älteren Radargeräten, jedoch auch heute verwendete[8] Senderbauart sind selbstschwingende Impuls-Oszillatoren, die aus einem Magnetron bestehen. Das Magnetron wird durch einen Hochspannungsimpuls gespeist und erzeugt einen Hochfrequenz-Impuls hoher Leistung (0,1…10 µs, Leistung einige kW bis einige MW). Der Hochspannungsimpuls für das Magnetron wird durch einen Modulator (Schaltröhre oder heute auch Halbleiterschalter mit MOSFET) bereitgestellt. Dieses Sendesystem wird auch POT (Power-Oszillator-Transmitter) genannt. Radargeräte mit einem POT sind entweder nicht kohärent oder pseudokohärent.
Ein in moderneren Radargeräten verwendetes Konzept ist der PAT (Power-Amplifier-Transmitter). Bei diesem Sendersystem wird in einem Generator der fertige Sendeimpuls mit kleiner Leistung erzeugt und dann mit einem Hochleistungsverstärker (Amplitron, Klystron, Wanderfeldröhre oder Halbleiter-Sendermodulen) auf die nötige Leistung gebracht. Radargeräte mit einem PAT sind in den meisten Fällen vollkohärent und können deshalb besonders gut zur Erkennung von bewegten Objekten durch Ausnutzung der Doppler-Frequenz eingesetzt werden.
Empfänger
[Bearbeiten | Quelltext bearbeiten]Der Empfänger nutzt meist die Sendeantenne und muss daher vor dem Sendeimpuls geschützt werden, Das geschieht mit Zirkulatoren, Richtkopplern und Nulloden. Der Empfang erfolgt mit dem Überlagerungsprinzip, früher wurde als Oszillator ein Reflexklystron verwendet, zur Mischung und Demodulation dienten koaxial aufgebaute, in Hohlleiter eingeschraubte Spitzendioden. Heutige Empfänger arbeiten vollständig mit Halbleitern und sind in Streifenleitertechnik aufgebaut.
Die Radarempfänger müssen sehr große Unterschiede in den Amplituden der Eingangssignale verarbeiten können. Dazu müssen sie mit einer möglichst großen Empfängerdynamik ausgestattet sein. Da die Echosignale aus dem Nahbereich wesentlich stärker sind als Echosignale aus großer Entfernung, liegt eine weitere Möglichkeit in einer laufzeitabhängigen Verstärkungsregelung, die eine Dynamikkompression bewirkt. Solche Schaltungen werden von den Radargeräteherstellern in ihren Gerätedokumentationen Sensitivity Time Control (STC) oder Gain Time Control (GTC) genannt.[9][10] Solche Schaltungen bewirken vor allem eine Reduzierung des störenden Einflusses von Festzielechos und erleichtern nachfolgenden Filtern, diese zu unterdrücken.
Bei Niederschlagsradar hat ein linearer Verstärkungsverlauf im Empfänger eine besondere Bedeutung für eine nachfolgende Berechnung der Regenrate. Hier werden oft mehrere Empfänger mit unterschiedlich kalibrierter Empfindlichkeit parallel betrieben und eine computergesteuerte Auswertung wählt dann den Empfänger aus, der das beste Signal-Rausch-Verhältnis bietet ohne das Echosignal zu übersteuern.
Dauerstrichradar (CW-Radar)
[Bearbeiten | Quelltext bearbeiten]Ein CW-Radar (CW für engl. continuous wave – Dauersender) konstanter Frequenz kann keine Entfernungen messen, aber über die Richtwirkung seiner Antenne den Azimut zu einem Ziel. Es wird zur Geschwindigkeitsmessung genutzt. Dabei wird die über eine Antenne abgestrahlte Frequenz vom Ziel (beispielsweise einem Auto) reflektiert und mit einer gewissen Doppler-Verschiebung, also geringfügig geändert, wieder empfangen. Da nur bewegte Objekte erkannt werden, fehlen störende Einflüsse von Festzielen. Durch einen Vergleich der gesendeten mit der empfangenen Frequenz (Homodyne Detektion) kann die radiale Geschwindigkeitskomponente bestimmt werden, die um einen Kosinusfaktor kleiner ist als der Betrag des Geschwindigkeitsvektors.
- An Schienenfahrzeugen werden Geschwindigkeitssensoren nach diesem Prinzip eingesetzt, sie strahlen schräg ins Gleisbett. Die erforderlichen Sendeleistungen sind sehr gering und werden oft mit Gunn-Dioden erzeugt.
- Erste Radargeräte der Verkehrspolizei waren ebenfalls Dauerstrichradar-Geräte. Da sie keine Entfernung messen konnten, arbeiteten sie noch nicht automatisch.
- Flugabwehr-Radargeräte mit Doppler-Erfassungsradar, wie das AN/MPQ-55 (CWAR), erkennen ihr Ziel auch bei starker Düppel-Störung.
- Radar-Bewegungsmelder arbeiten ebenfalls nach diesem Prinzip, sie müssen jedoch hierzu auch langsame Änderungen der Empfangsfeldstärke aufgrund sich ändernder Interferenzverhältnisse registrieren können.
Moduliertes Dauerstrichradar (FMCW-Radar)
[Bearbeiten | Quelltext bearbeiten]
Eine weiterentwickelte Art sind die FMCW (frequency modulated continuous wave) Radargeräte, auch Modulated CW-Radar oder FM-Radar. Sie senden mit einer sich ständig ändernden Frequenz. Die Frequenz steigt entweder linear an, um bei einem bestimmten Wert abrupt wieder auf den Anfangswert abzufallen (Sägezahnmuster), oder sie steigt und fällt abwechselnd mit konstanter Änderungsgeschwindigkeit. Durch die lineare Änderung der Frequenz und durch das stetige Senden ist es möglich, neben der Differenzgeschwindigkeit zwischen Sender und Objekt auch gleichzeitig deren absolute Entfernung voneinander zu ermitteln. Radar-Fallen der Verkehrspolizei arbeiten auf diese Weise und lösen bei Geschwindigkeitsüberschreitung bei einer bestimmten Entfernung zum Ziel den Fotoblitz aus. Radar-Höhenmesser von Flugzeugen und Abstandswarngeräte in Autos arbeiten nach diesem Prinzip. Diese Technologie wird auch für Rundsichtradar im marinen Bereich eingesetzt (Broadband Radar).[11] Eine Nutzung dieses Broadband-Radars zur Luftraumaufklärung ist nicht möglich, da die Dopplerfrequenz von Flugzeugen zu groß ist und dadurch Messfehler von bis zu mehreren Kilometern entstehen. Ursache dafür ist die verwendete sägezahnförmige Modulation, wegen der das Broadband Radar nicht zwischen Frequenzdifferenz verursacht durch Laufzeit und Frequenzdifferenz verursacht durch Doppler-Effekt unterscheiden kann.
FMCW-Radare werden außerdem in industriellen Anwendungen zur Abstandsmessung und zur Messung von Füllstandshöhe in Tanks eingesetzt.
Frequenzbänder
[Bearbeiten | Quelltext bearbeiten]Radare werden auf Frequenzen betrieben, die in sogenannte Frequenzbänder eingeteilt sind. Die Bezeichnungen der Bänder wurden vom amerikanischen Militär während des Zweiten Weltkriegs vergeben. Diese Bezeichnungen wurden später vom amerikanischen Institute of Electrical and Electronics Engineers (IEEE) und international von der Internationalen Fernmeldeunion (engl. International Telecommunication Union, ITU) übernommen.
| Name des Bands | Frequenzbereich | Wellenlänge | Anmerkungen |
|---|---|---|---|
| HF | 3–30 MHz | 10–100 m | HF wie "High Frequency". Wird für "Über den Horizont-Radare" genutzt |
| P | < 300 MHz | >1 m | P wie "Preceeding" (deutsch: vorhergehend) . Wird für "primitive" Radare verwendet. |
| VHF | 50–330 MHz | 0,9–6 m | VHF, von "Very High Frequency". Wird von Radaren mit sehr großer Reichweite und Bodenradaren verwendet. |
| UHF | 300-1 000 MHz | 0,3-1 m | UHF von "Ultra High Frequency" Radare mit sehr großer Reichweite (z. B. Ortung ballistischer Raketen), Boden- und Laubdurchdringung. |
| L | 1–2 GHz | 15–30 cm | L wie "long". Wird für die Langstrecken-Flugsicherung und Luftüberwachung verwendet, GPS (und damit darauf basierende passive Radare). |
| S | 2–4 GHz | 7,5–15 cm | S wie "short". Wird von lokalen Luftverkehrsradaren, Wetter- und Marineradaren verwendet. |
| C | 4–8 GHz | 3,75–7,5 cm | Kompromiss zwischen dem S- und dem X-Band für Satellitentransponder und Wetterradare. |
| X | 8–12 GHz | 2,5–3,75 cm | Für Wetterradare, Geschwindigkeitsregelungen, Raketensuchgeräte, Navigationsradare, Kartierungsradare mit mittlerer Auflösung und Bodenüberwachung von Flughäfen. |
| Ku | 12–18 GHz | 1,67–2,5 cm | Frequenzen knapp unter dem K-Band ("u"-Index für "under") für hochauflösende Kartierungsradare und Satellitenaltimetrie. |
| K | 18–27 GHz | 1,11–1,67 cm | K wie "kurz". Ku und Ka werden stark vom Wasserdampf absorbiert und werden zur Detektion von Wolkentröpfchen in der Meteorologie und in manuellen (24.150 ± 0.100 GHz) Straßenradaren eingesetzt. |
| Ka | 27–40 GHz | 0,75–1,11 cm | Frequenz knapp über K ("a"-Index für "über") für Kartierung, Kurzstrecken-, Flughafen-Bodenüberwachung, automatisierte (34.300 ± 0,100 GHz) Straßenradare und Antikollisionsradare, die auf High-End-Fahrzeugen montiert sind. |
| mm | 40–300 GHz | 1–7,5 mm | Millimeterband, das in folgende 4 Teile unterteilt wird: |
| Q | 40–60 GHz | 5–7,5 mm | Nutzung für militärische Kommunikation |
| V | 50–75 GHz | 6,0–4 mm | Starke Absorption durch die Atmosphäre |
| E | 60–90 GHz | 6–3,33 mm | |
| W | 75–110 GHz | 2,7 mm | Nutzung für Kfz-Antikollisionsradare und für hochauflösende Wetterbeobachtung über kurze Entfernungen verwendet. |
Ferner gibt es folgende militärische Bezeichnungen für Frequenzbänder, die für Radare ebenfalls of genutzt werden:[12]
| Band | Frequenzbereich |
|---|---|
| A | 0–250 MHz[13] |
| B | 250–500 MHz |
| C | 0,5–1 GHz |
| D | 1–2 GHz |
| E | 2–3 GHz |
| F | 3–4 GHz |
| G | 4–6 GHz |
| H | 6–8 GHz |
| I | 8–10 GHz |
| J | 10–20 GHz |
| K | 20–40 GHz |
| L | 40–60 GHz |
| M | 60–100 GHz |
| N | 100–200 GHz |
| O | 200–300 GHz |
Genauere Informationen, in welchen frequenzbereichen Radare arbeiten, findet man in Artikel 5 der Vollzugsordnung für den Funkdienst, kurz VO Funk (engl. Radio Regulations) der Internationalen Fernmeldeunion (ITU).[14] Geeignete Frequenzzuweisungen für Radare sind dort als Ortungsfunkdienst (engl. Radio Location Service) oder als Flugnavigationsfunkdienst (engl. Aeronautical Radionavigation Service) enthalten. Eine Besonderheit dabei ist, dass Radare der Flugsicherung (SSR, SRE-M, ASR, ASDE bzw. SMR und PAR) sowie Radar-Altimeter von der ITU in der VO Funk als Flugnavigationsfunkdienst eingestuft sind. Folgende Tabelle enthält einen Auszug aus der Frequenztabelle in Artikel 5 der ITU-Radio Regulations mit Frequenzuweisung, die für Radare geeignet sind.
| Auszug aus den ITU-Radio Regulations[14] | |||||
|---|---|---|---|---|---|
| Deutschland | Nutzer | Bemerkung | |||
| Frequenzbereiche in MHz | |||||
| 229 | 962–1 164 | FLUGNAVIGATIONSFUNKDIENST | ziv, mil | Flugsicherungsanlagen, Sekundärradar (SSR) auf 1030 und 1090 MHz (sowie Flugnavigationssysteme TACAN, DME, ACAS) | |
| 233 | 1 250-1 260 | FLUGNAVIGATIONSFUNKDIENST
Amateurfunkdienst |
ziv | Mittelbereichs-Rundsuchradar der Flugsicherung, SRE-M-Radare | |
| 236 | 1 340-1 350 | FLUGNAVIGATIONSFUNKDIENST | ziv | Mittelbereichs-Rundsuchradar der Flugsicherung, SRE-M-Radare | |
| 288 | 2 700-2 900 | FLUGNAVIGATIONSFUNKDIENST
NICHTNAVIGATORISCHER ORTUNGSFUNKDIENST |
ziv, mil | Airport Surveillance Radare (ASR) der Flugsicherung | |
| 289 | 2 900-3 100 | FLUGNAVIGATIONSFUNKDIENST
NICHTNAVIGATORISCHER ORTUNGSFUNKDIENST |
ziv, mil | ||
| 295 | 4 200-4 400 | FLUGNAVIGATIONSFUNKDIENST | ziv, mil | Radar-Altimeter (Radarhöhenmesser) an Bord von Flugzeugen | |
| 306 | 5 350-5 460 | ERDERKUNDUNGSFUNKDIENST ÜBER SATELLITEN (aktiv)
FLUGNAVIGATIONSFUNKDIENST NICHTNAVIGATORISCHER ORTUNGSFUNKDIENST |
ziv, mil | ||
| 331 | 5 350-5 460 | FLUGNAVIGATIONSFUNKDIENST
SEENAVIGATIONSFUNKDIENST NICHTNAVIGATORISCHER ORTUNGSFUNKDIENST |
ziv, mil | ||
| 354 | 9000–9200 | FLUGNAVIGATIONSFUNKDIENST
SEENAVIGATIONSFUNKDIENST Nichtnavigatorischer Ortungsfunkdienst |
ziv, mil | ASDE (Airport Surface Detection Equipment) bzw. SMR, (Surface Movement Radar) sowie PAR (Precision Approach Radar) der Flugsicherung | |
| 356 | 9300–9500 | ERDERKUNDUNGSFUNKDIENST ÜBER SATELLITEN (aktiv)
FLUGNAVIGATIONSFUNKDIENST ORTUNGSFUNKDIENST NAVIGATIONSFUNKDIENST NICHTNAVIGATORISCHER ORTUNGSFUNKDIENST, WELTRAUMFORSCHUNGSFUNKDIENST (aktiv) Demonstrationsfunk für Bildungseinrichtungen Funkbewegungsmelder geringer Reichweite |
ziv, mil | ASDE (Airport Surface Detection Equipment) bzw. SMR, (Surface Movement Radar) der Flugsicherung | |
- Anmerkung zur Schreibweise :
- mit GROSSBUCHSTABEN: Primärfunkdienst
- in Normalschreibweise: Sekundärfunkdienst
Neue Technologien
[Bearbeiten | Quelltext bearbeiten]Begünstigt durch höhere Integration einzelner Baugruppen können komplette Radargeräte als kleinste Module aufgebaut werden. Der komplette Hochfrequenzteil eines Radars lässt sich zum Beispiel in einem einzelnen integrierten Schaltkreis unterbringen. Das ermöglicht neue Konzepte beim Aufbau größerer Radarsysteme. Durch eine Vielzahl kleiner synchron und kohärent arbeitender Radarmodule kann ein Phased-Array-Radarsystem auch in einem unebenen Gelände verteilt werden. Laufzeitunterschiede der einzelnen Module durch die Unebenheit werden durch Software ausgeglichen. Ein solches System wird dann Distributed Radar System (DRS) genannt. Es kann zum Beispiel auf einem Berghang oder auch auf der Außenhaut eines Kriegsschiffes verteilt zu einem Großraumradar aufgebaut werden.[15]
Gesundheitsschäden durch Radar
[Bearbeiten | Quelltext bearbeiten]Die in den Schaltröhren entstehende Röntgenstrahlung[16] war bis mindestens in die 1980er Jahre bei militärischen Radaranlagen häufig unzureichend abgeschirmt. Darüber hinaus mussten Wartungs- und Justierarbeiten oft am geöffneten Gerät durchgeführt werden. Dies führte zu Strahlenschäden bei vielen Bedienungs- und Wartungssoldaten der NVA und der Bundeswehr. Eine große Zahl von Soldaten, vor allem ehemalige Radartechniker, erkrankte dadurch später an Krebs, viele sind bereits in relativ jungem Alter verstorben. Die Zahl der Geschädigten (Radaropfer) beträgt mehrere Tausend. Grundsätzlich wurde der Zusammenhang von der Bundeswehr anerkannt und in vielen Fällen eine Zusatzrente gezahlt.
Siehe auch
[Bearbeiten | Quelltext bearbeiten]Literatur
[Bearbeiten | Quelltext bearbeiten]- David K. Barton (Hrsg.): Radar evaluation handbook. Artech House, Boston MA 1991, ISBN 0-89006-488-1, (Artech House radar library).
- Guy Kouemou (Hrsg.): Radar Technology. InTech, 2010, ISBN 978-953-307-029-2, (online)
- Albrecht Ludloff: Praxiswissen Radar und Radarsignalverarbeitung (= Viewegs Fachbücher der Technik). 3., überarbeitete und erweiterte Auflage. Vieweg Verlag, Braunschweig 2002, ISBN 3-528-26568-X.
- Albrecht Ludloff: Praxiswissen Radar und Radarsignalverarbeitung (= Praxis : Informations- und Kommunikationstechnik). 4., überarbeitete und erweiterte Auflage. Vieweg Verlag, Braunschweig 2008, ISBN 978-3-8348-0597-3.
- Jakov D. Schirman: Theoretische Grundlagen der Funkortung. Militärverlag der DDR, Berlin 1977.
- Merill I. Skolnik (Hrsg.): Radar Handbook. 3. Auflage. Mcgraw-Hill Professional, New York NY 2008, ISBN 978-0-07-148547-0.
Weblinks
[Bearbeiten | Quelltext bearbeiten]- Grundlagen der Radartechnik auf radartutorial.eu, dazu einige lehrgangsorientierte Videos
- Die Geschichte des Radars auf 100-jahre-radar.de
- Fraunhofer-Institut für Hochfrequenzphysik und Radartechnik FHR
- Weltraumbeobachtungsradar TIRA (Tracking and Imaging Radar) des Fraunhofer FHR
- DLR-Institut für Hochfrequenztechnik und Radarsysteme
Einzelnachweise
[Bearbeiten | Quelltext bearbeiten]- ↑ Die indirekte Distanzmessung mit Radar, Pionier, Zeitschrift für Übermittlungstruppen, Nummer 1, Januar 1949
- ↑ Ch. Wolff: Radargerätekartei. In: Radartutorial. November 1998, abgerufen am 15. Dezember 2020.
- ↑ Ekbert Hering, Rolf Martin: Optik für Ingenieure und Naturwissenschaftler: Grundlagen und Anwendungen. Carl Hanser Verlag, 2017, ISBN 3-446-44509-9
- ↑ Eugene Hecht: Optik 4. Auflage. Oldenbourg, München 2005, ISBN 3-486-27359-0
- ↑ Patent DE165546: Verfahren, um entfernte metallische Gegenstände mittels elektrischer Wellen einem Beobachter zu melden. Angemeldet am 30. April 1904, veröffentlicht am 21. November 1905, Erfinder: Chr. Hülsmeyer.
- ↑ Biografie von William A. S. Butement
- ↑ BfN-Schriften 635 2022, Vergleichbarkeit verschiedener Radarsysteme zur Erfassung des Vogelzugs, Jorg Welcker,. (natur-und-erneuerbare.de [PDF]).
- ↑ Peter Volk: Funknavigation – Radar gestern und heute. In: seefunknetz.de. 2005, abgerufen am 28. Februar 2015.
- ↑ C.Wolff: Verstärkungsregelungen. In: Radartutorial. November 1998, abgerufen am 16. Mai 2024.
- ↑ C.Wolff: STC-Schaltung. In: Radartutorial. November 1998, abgerufen am 16. Mai 2024.
- ↑ Broadband Radar auf simrad-yachting.com
- ↑ NATO Allied Radio Frequency Agency (ARFA) HANDBOOK – VOLUME I; PART IV – APPENDICES, … G-2, … NOMENCLATURE OF THE FREQUENCY AND WAVELENGTH BANDS USED IN RADIOCOMMUNICATION.
- ↑ a b Whitaker: Handbook of Broadcast Engineering. McGraw-Hill, 2005
- ↑ a b ITU, Radio Regulations Articles, Edition 2024. (itu.int).
- ↑ Christian Wolff: Distributed Radar System. In: Radartutorial. November 1998, abgerufen am 28. April 2021.
- ↑ R. Timothy Hitchcock, Robert M. Patterson: Radio-Frequency and ELF Electromagnetic Energies: A Handbook for Health Professionals. Wiley, 1950, ISBN 0-471-28454-8, eingeschränkte Vorschau in der Google-Buchsuche.